@DL4PD for the electronics, it exactly the same as for the Satnogs Rotator, 2 Stepper controller, sized for the stepper you buy, an Arduino connected to your raspberry pi, and two optical, or mechanical endstop.
You maybe missed this link in the thread, which permit to see the full design https://a360.co/2CAJL9K
Cool project! Thanks for sharing. Have you got any trouble with the RV030 in terms of outdoor use or are they well enough encased? I can’t seem to find a IP rating for them.
Hi @raaptormet !
Thanks for your interest !
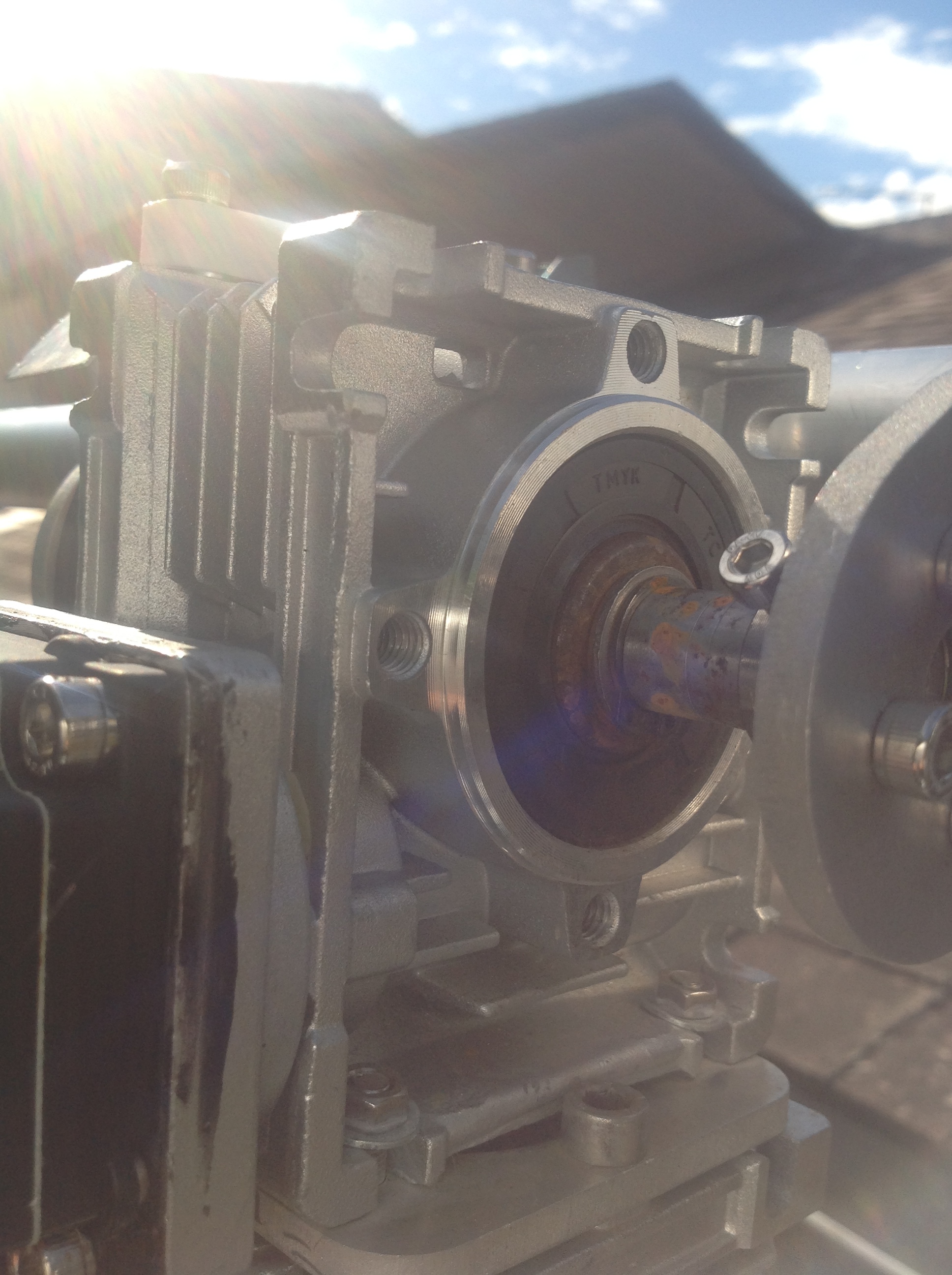
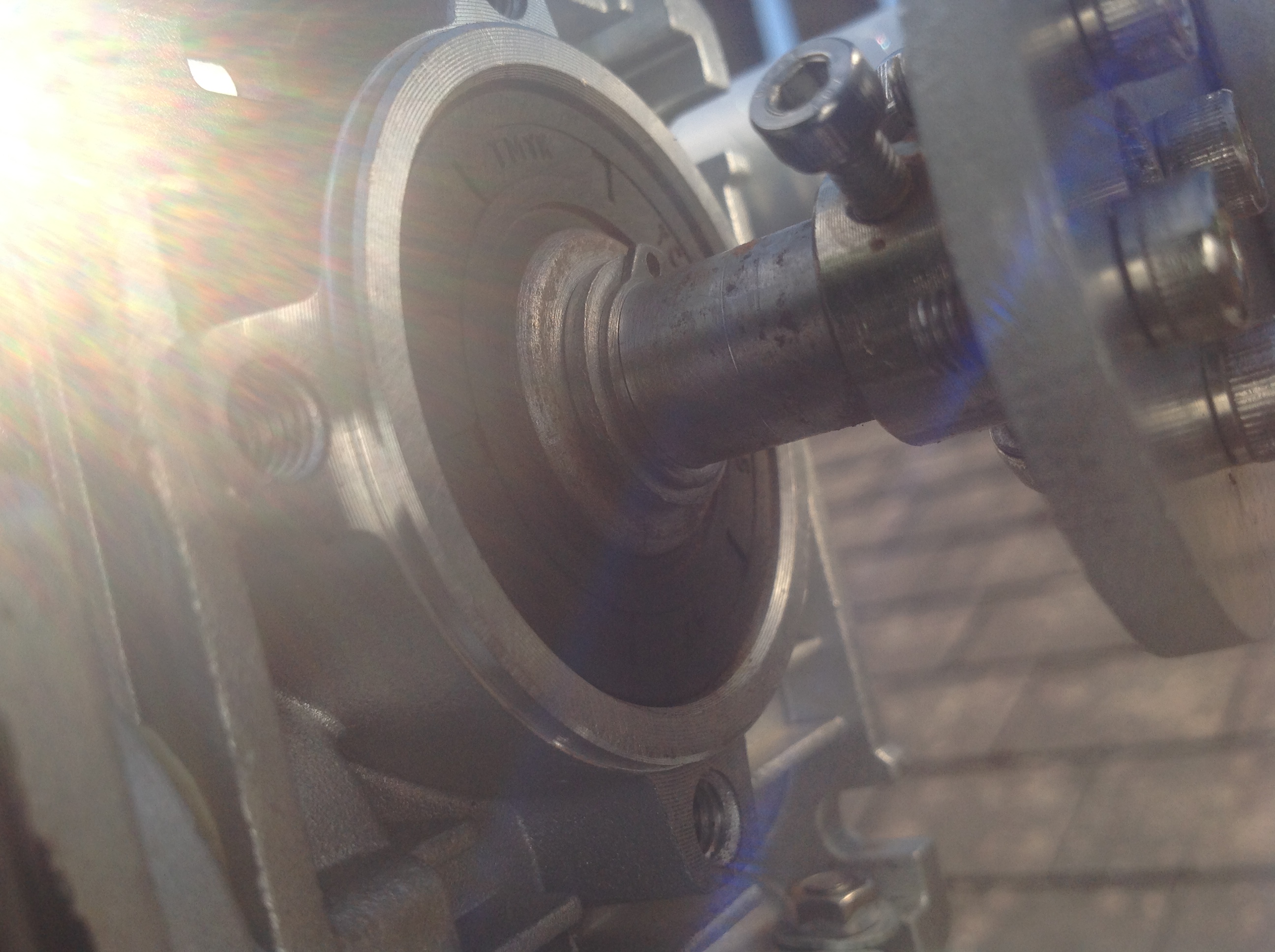
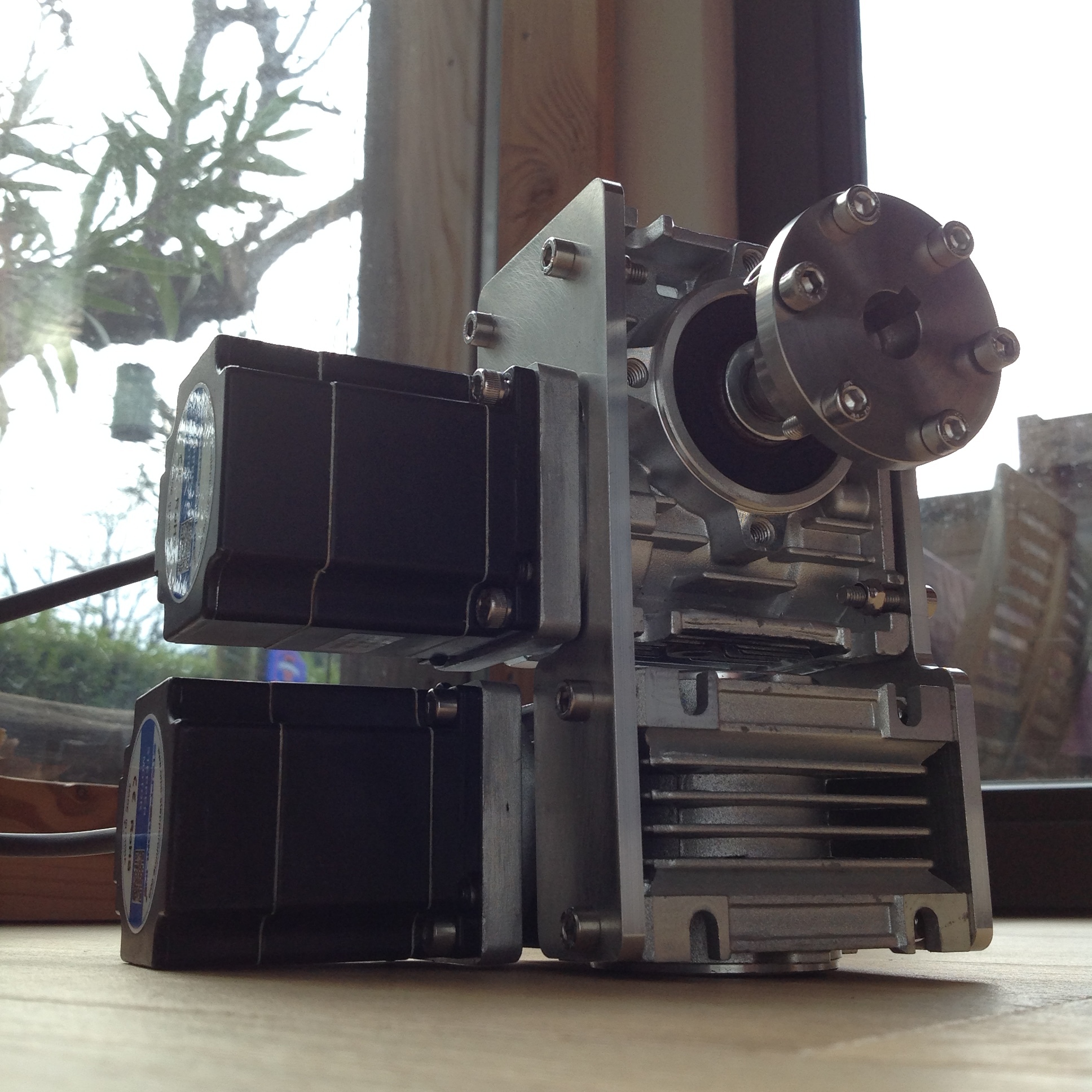
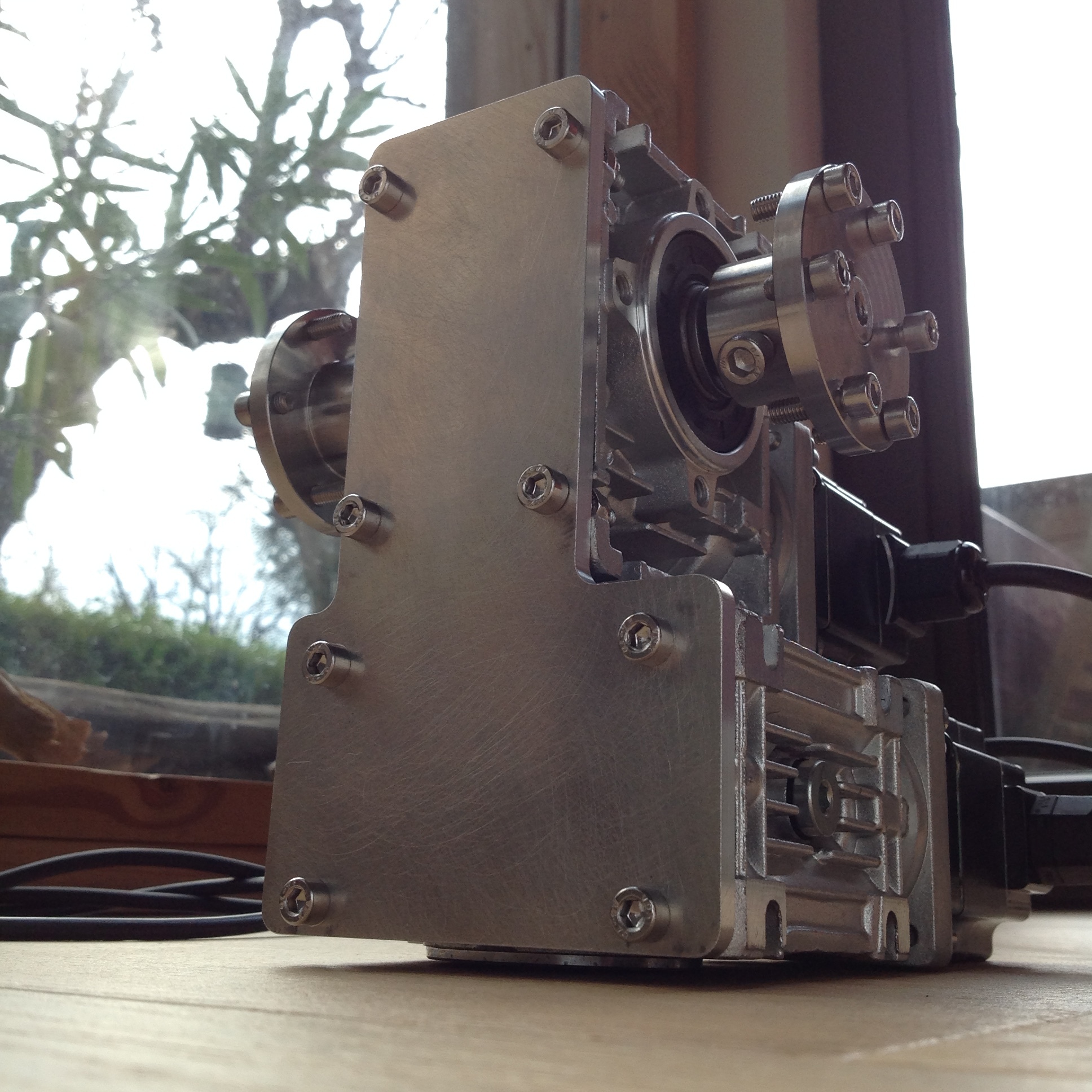
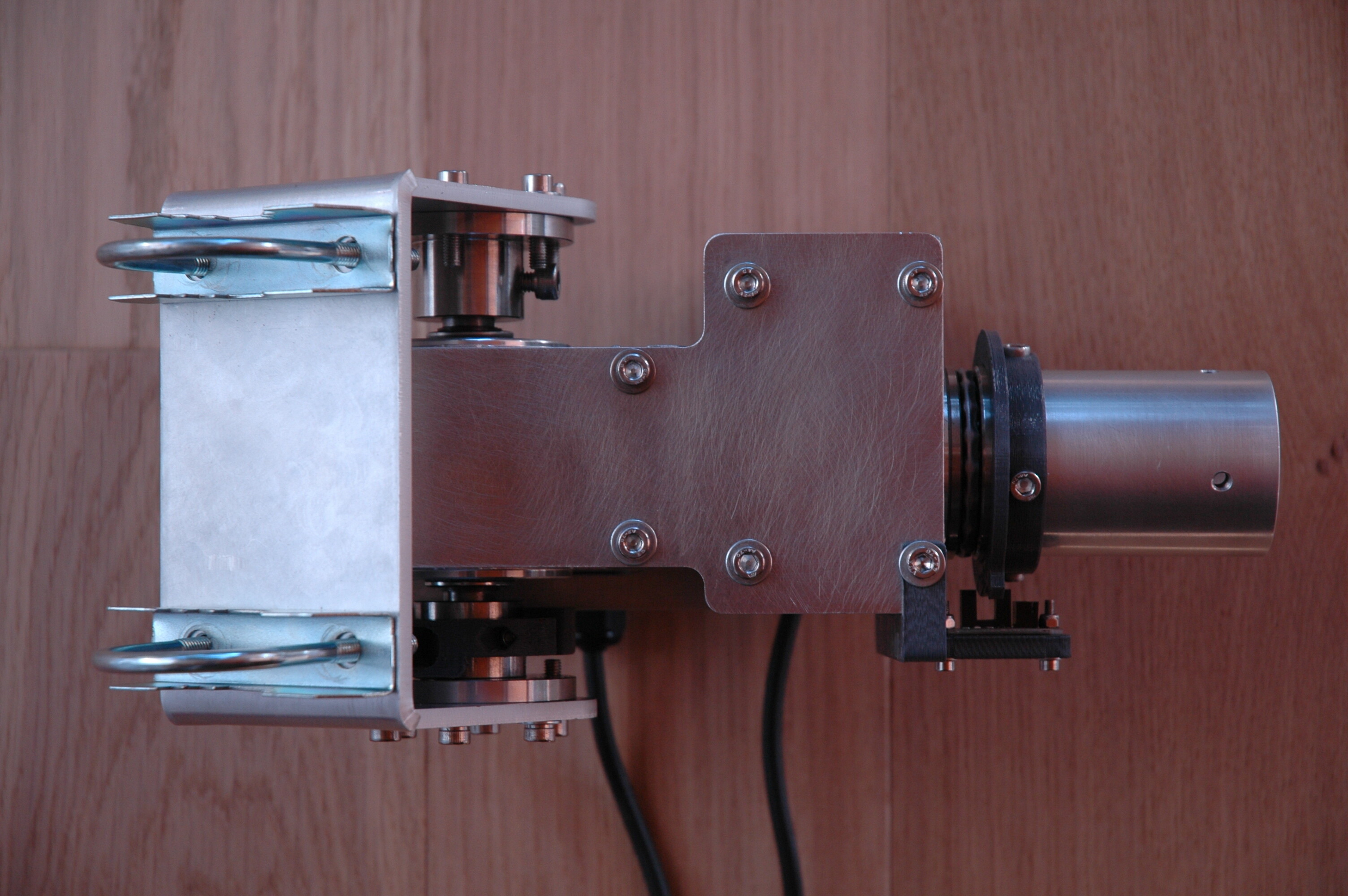
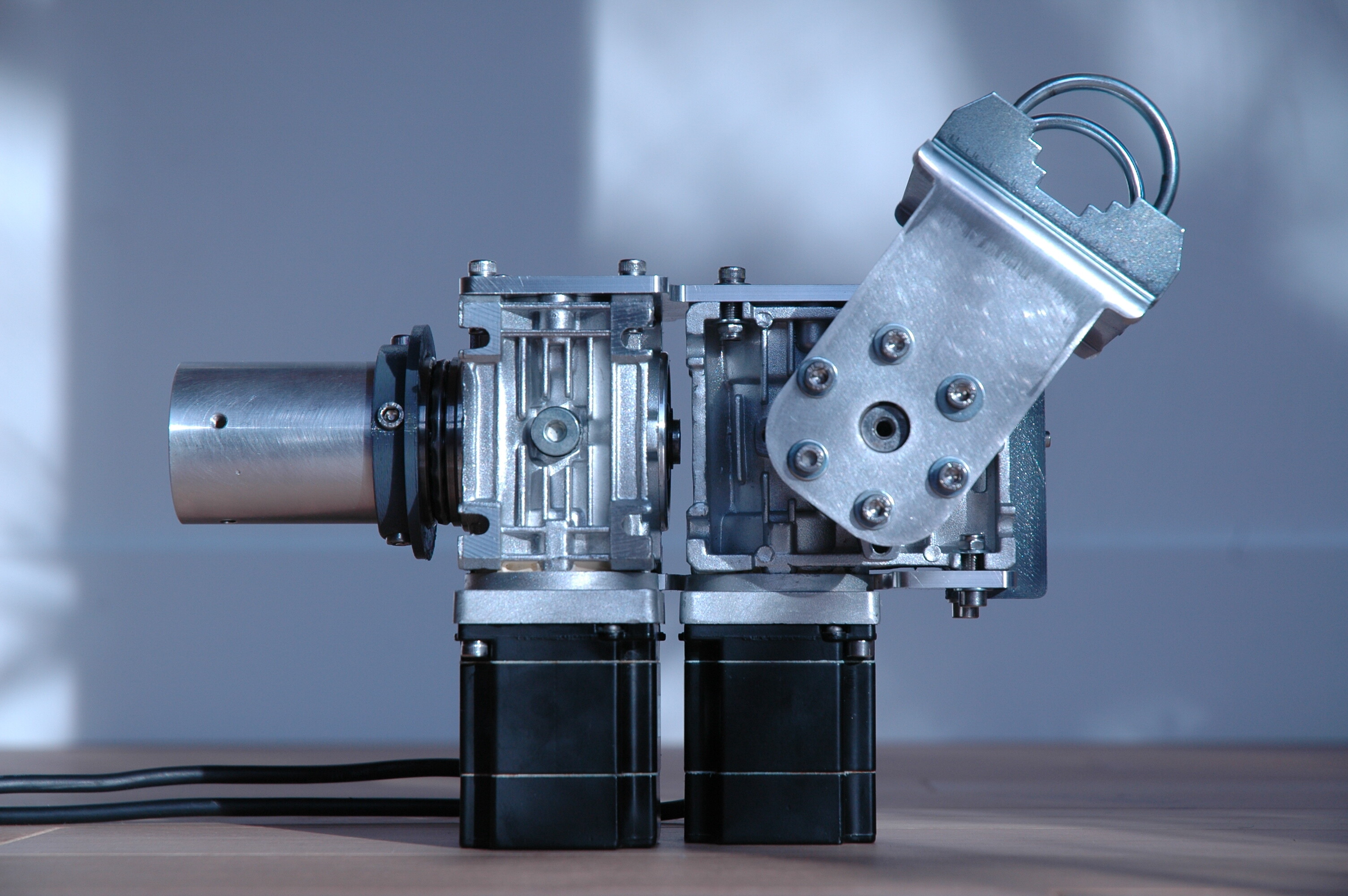
The structure of the RV030 is in aluminium, then for the gears they are in an oil bath and therefore totally isolated from the outside by several joints, however it seems that the part that drives the axle rust a little on the surface, but by brushing a little bit the rust disappears.
My only current problems are a usb cable that has a false contact and a raspberry pi that programs 2 observations at the same time, so mechanically speaking, everything works great !
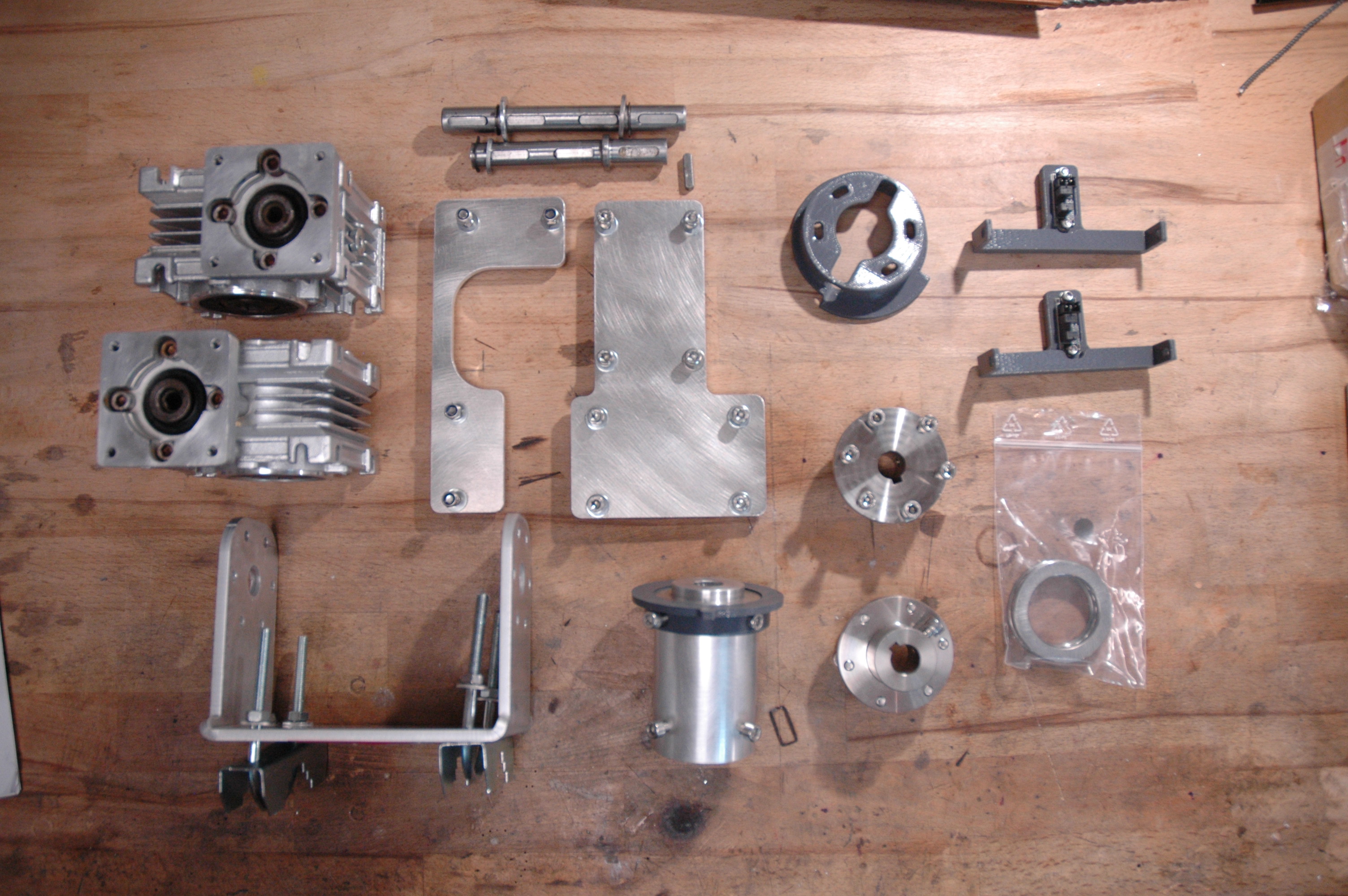
The project is on pause on my side for external reasons. However, here is a new repo with few more information, the latest files, pictures, links, and a license.
Thanks! Indeed it was designed for!
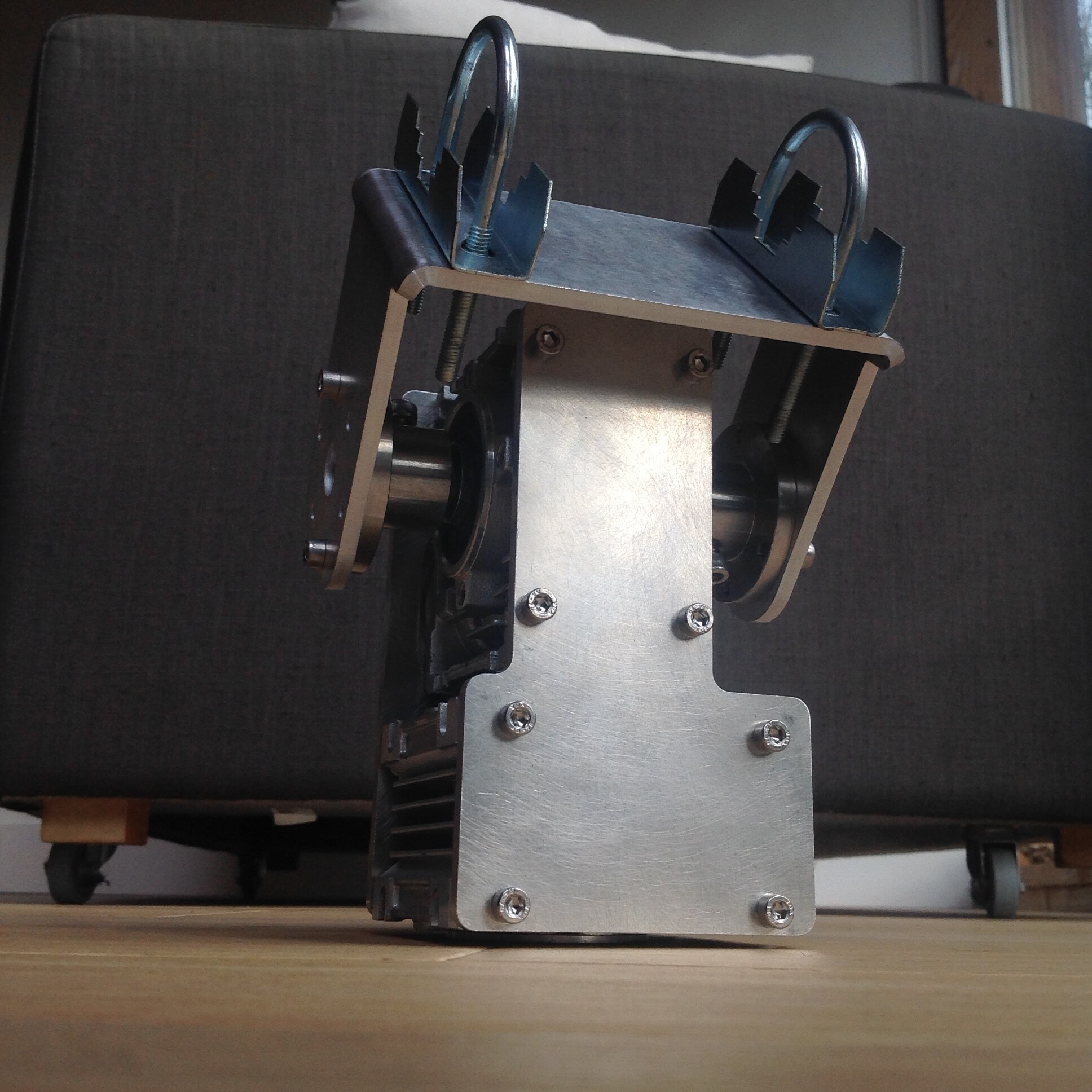
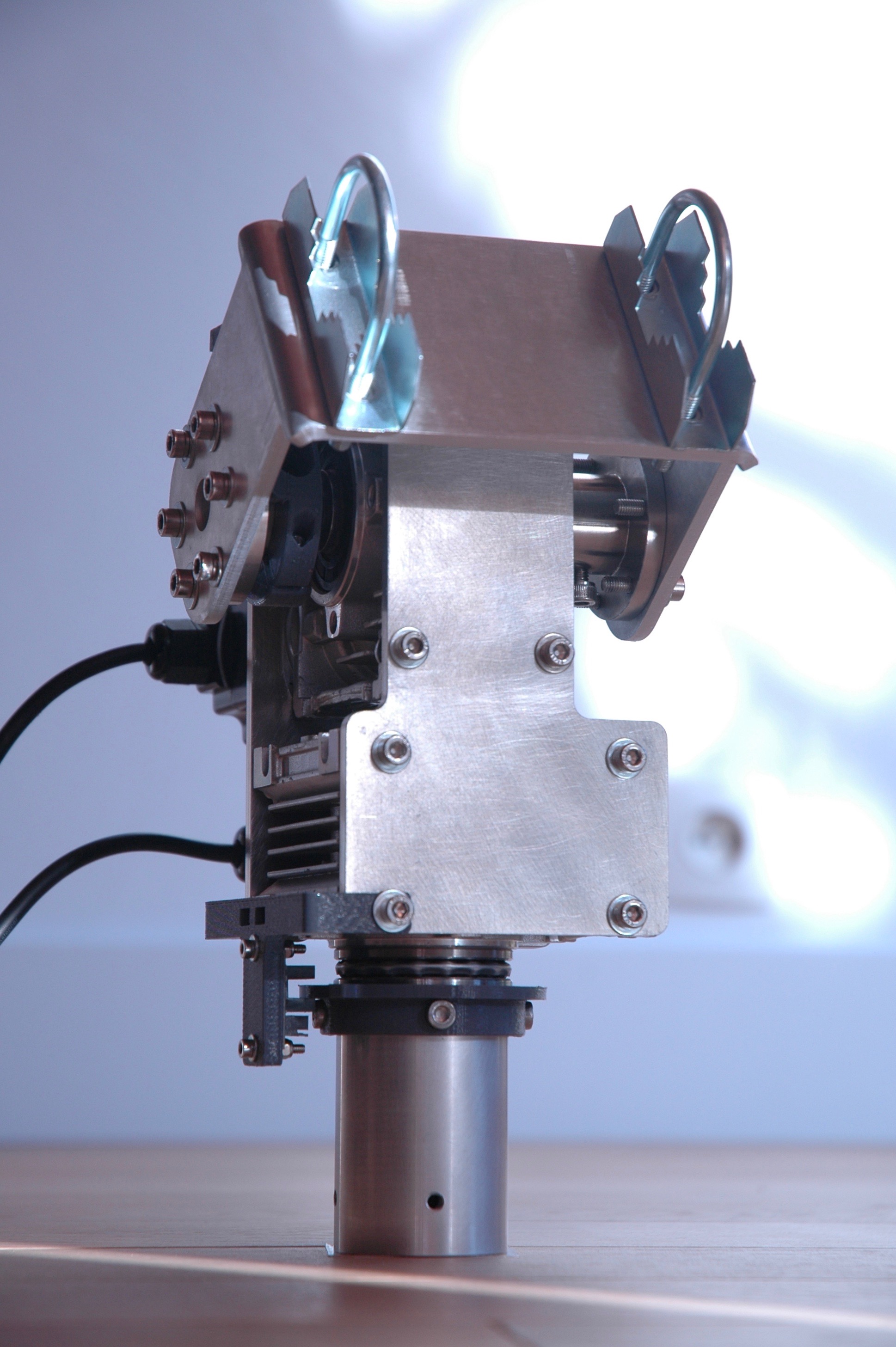
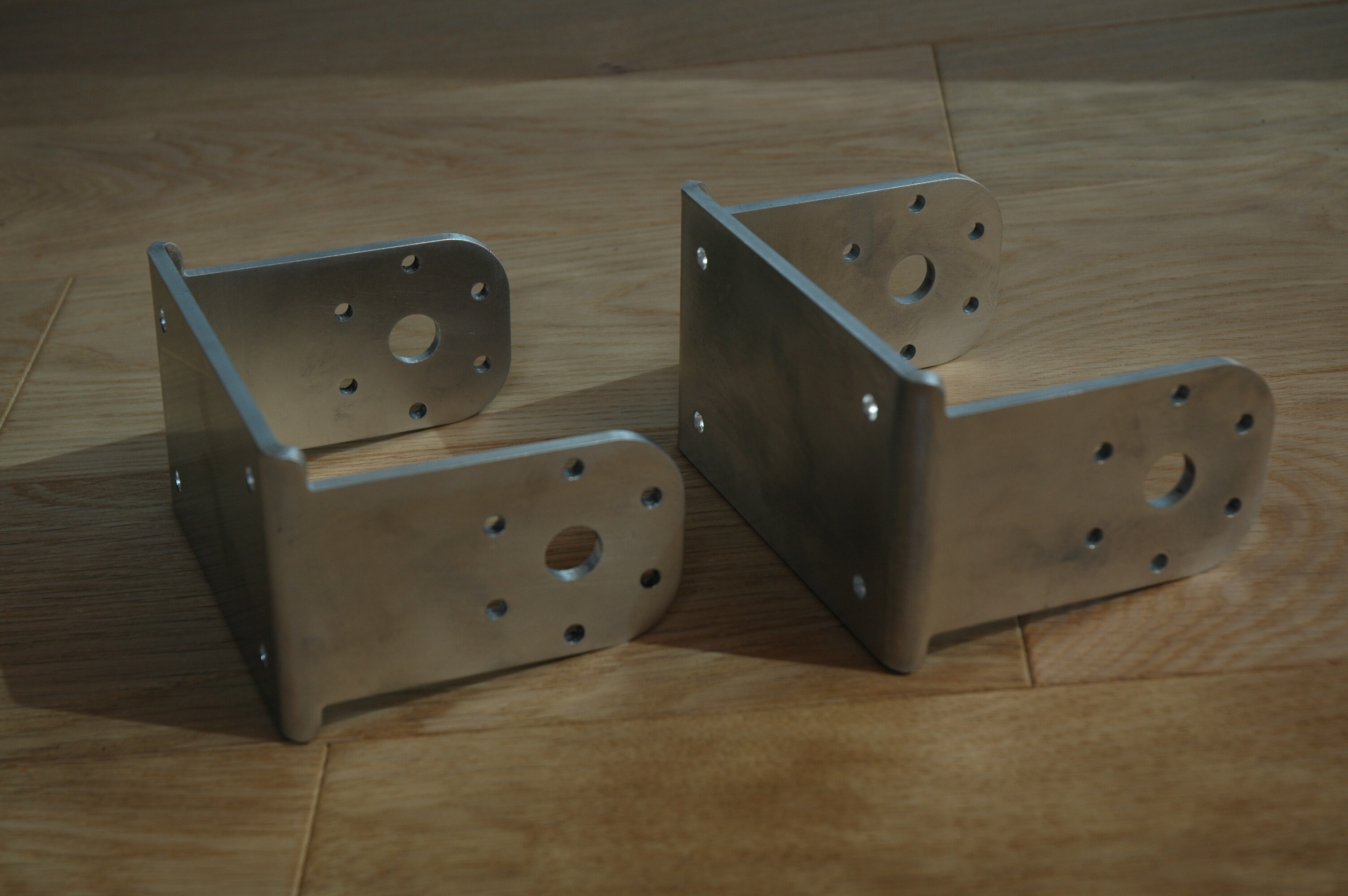
One of the last parts, the bracket is also validated since this morning, I’m now just waiting for the very last part to publish more information about it.
Awesome job and it looks amazing for the smaller Yagi Antenna setup… Keep me posted please I’d like to get my hands on one or the parts to put one together for testing it in my location and cold climate which was -43c over night and the Yaesu G-5500 doesn’t like that temperature one bit.
Keep up the great work and thanks for sharing with the community.
I would also be interested to see how the rotator resist to really hard climate, the main concern will be to see how the wormgearbox react to really cold temperature.
The gears are in an oil bath, so if it’s not warmed up a bit I think it might solidify at this temperature and block the rotator. However, the advantage with the use of stepper motors is that they can also be considered as heating element! So it’s possible that they will be hot enough to allow the oil in the gearbox to remain liquid enough even at -40°C, but this remains to be tested!
Hey @Yohan_Hadji very nice work. Recently we got, i think, your first kit. It works nice and smooth. We make indoors tests (as station-200 needs to update photo ) and when we have time we will put it in Athens hackerspace rooftop.
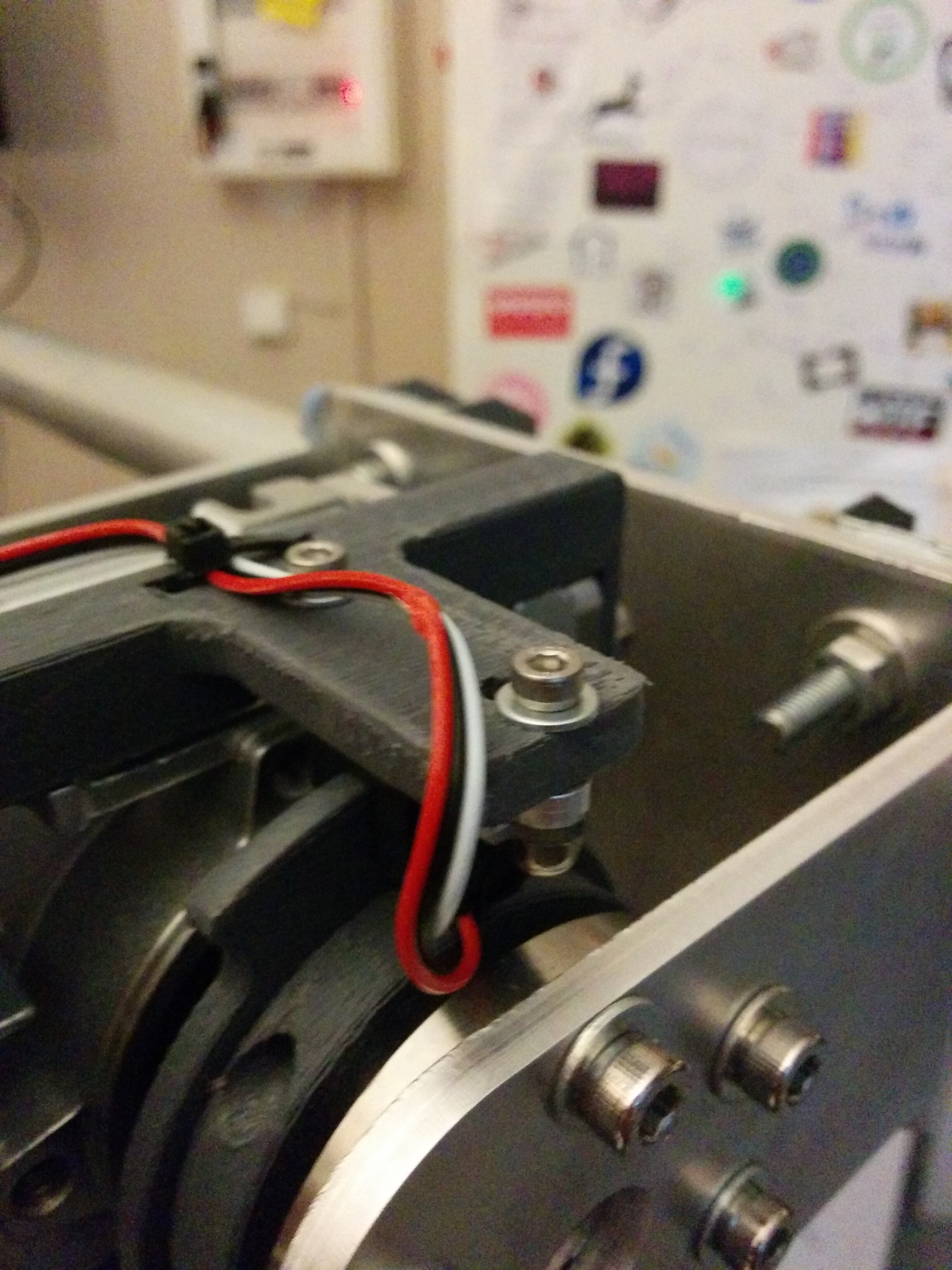
The stepper motor drives are tuned at 4.9A(peak current) as a result after two days with 5-8 observation the elevation axis stop working due to over temperature. After a power cycle of stepper drive it works again. For the same reason the cables are hot. To resolve it we reduce the current to 3.8A(peak current) but the elevation is rotated harder than before. I just read that the SW4 of driver is used to set motor idle current percentage at 50% when is OFF position, i need to check. Also @Yohan_Hadji do you have any suggestion or reference about the current setting(rated/peak/RMS) vs microstepping for this set-up?
This comment is related with specs. The worm gear box it has static efficiency ηs = ~0.4, that means if the stepper motor has torque (stall/holding) 1.2Nm the output shaft (stall/holding) torque could be 1.2Nm*50(gear ratio)*0.4(static efficiency) = 24Nm
It is unclear which is the firmware that the arduino uno runs, that would confuse a contributor
It would be nice to add your design in SatNOGS - wiki, i can help you!!





 ) and when we have time we will put it in Athens hackerspace rooftop.
) and when we have time we will put it in Athens hackerspace rooftop.