Hi @azisi!
You got indeed the very first kit!
Others kits have just left all over the world and will help to improve it I hope.
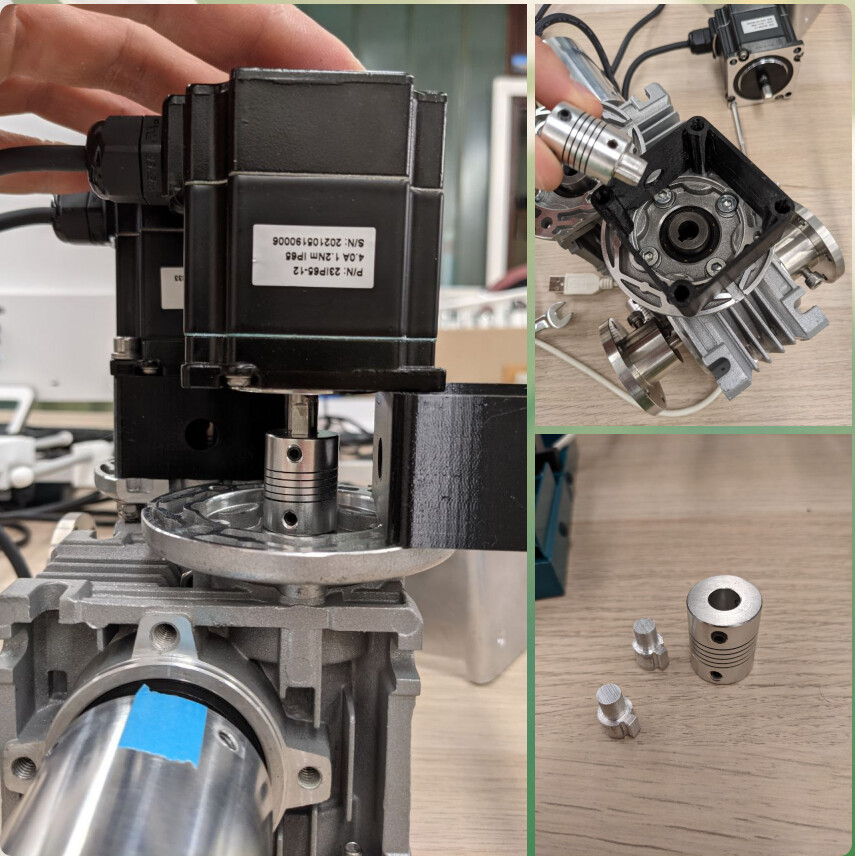
I thought a single cable tie would be enough to solve this problem I already had, but indeed it seems necessary to add a second one, or a notch in the 3D printed part to solve this problem.
If you are talking about the drivers being too hot, in my setup, the box with the drivers was outside and naturally ventilated, that’s maybe why I didn’t have this problem.
But these stepper motors are rated for 4.0Amp https://www.omc-stepperonline.com/download/23IP65-12.pdf.
What I noticed then was that the larger the microstepping, the lower the current required (for a given speed) and the lower the torque. For the most power and speed (and with drivers that support it) I think the ideal is therefore to have the least microstepping.
As for the cables, if they are really too hot it would be necessary to provide a larger section.
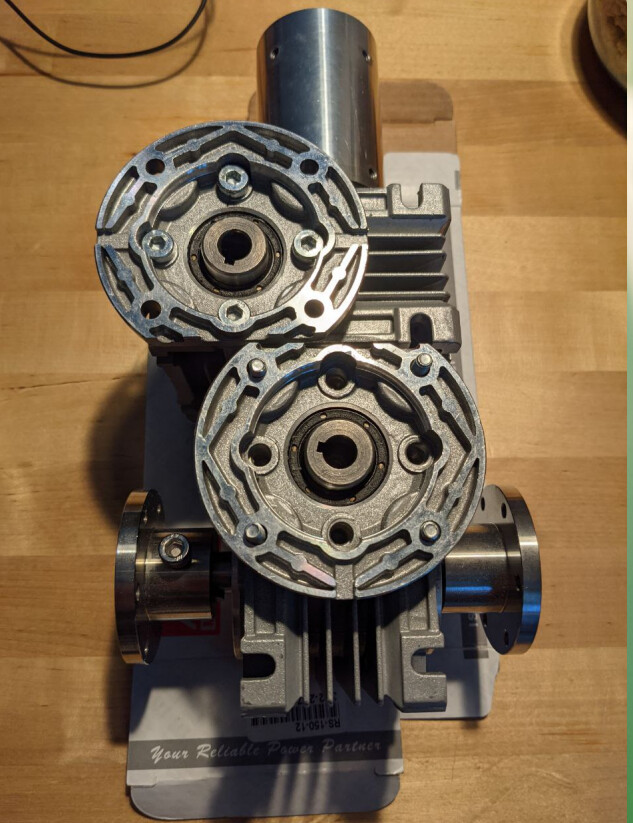
It seems to me like a very good idea, I need to take a look at it, but the rotator need no power when on idle because the reducer is not reversible.
Please note that the gear ratio is not 50 but 80 on your rotator, also I am not sure about this value of 0.4, it seems that it can vary depending on the manufacturer of the RV030. The best would be to conduct a torque test in conditions…!
That is a very good comment… I totally forgot to publish it!
It’s a very slightly modified version of the original code for the rotator controller, only the speed, acceleration, gear ratio, and pin are modified. I will quickly correct my mistake!
I think I definitely need a bit of help to understand how to write correctly something in the wiki, but yes with great pleasure!
Thank you very much for your feedback, which I hope will help to improve SuperAntennaz!
Yoyo
 . So the correct current configuration must be: RMS current 3.5A (4.9A peak). I will investigate more the over temperature issue with this setting.
. So the correct current configuration must be: RMS current 3.5A (4.9A peak). I will investigate more the over temperature issue with this setting.