Hi,
I’m a 15 years (EDIT : 2022, now turned 17…!) old french student
I like drone, planes… Satellites, and overall I try to be a Maker !
One year ago I had the chance to participate to a CubeSat project with my physic professor, we created and programmed a CubeSat that today can take photos, display sensor data send GPS coordinates and all that wireless with a python interface, this project made me really want to learn and to interest me more about space !
After hours spent on the internet I found one day the SatNOGS project, and the first thing that I thought was “huuu this is soo coool I want one” So I decided to build my own rotator, why did I say “my own” because I didn’t build the Rotator V3, and that for many reason :
I want to do something by myself
I heard that for some reason (3D printed part) that the rotator V3 wasn’t very durable, and not very strong (only 30 Nm) I wanted to build something more durable (all metal) and more stronger (with the calculation this is 120 Nm, so with the friction lets say 80Nm)
I had an aluminium box that i always wanted to reuse for another project
And as a student I didn’t had the ~ $220 to build the rotator V3 (Mine costed me ~ 105 €)
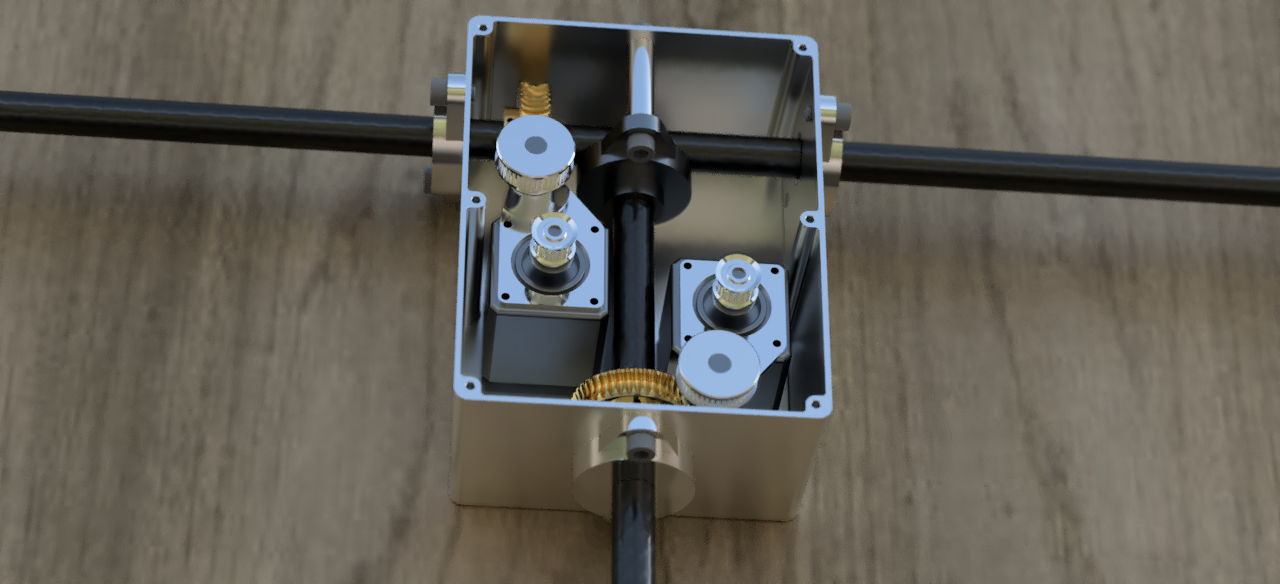
So enough spoken now its time for the good stuff, taaa daaam :
Hi Yo Yo
I am very interested in your project because I too have build some rotators. Not satnogs rotators as I don’t have access to a 3D printer and I too have doubts about the durability and strength of 3D printed parts.
I built one rotator using 2 very old TV antenna rotators. One for Azimuth, the other for elevation. They are controlled by a Arduino micro and a electronic compass. It’s crude but it works. I also build a light duty one using DC motors controlled by eCompass and Raspberry Pi Zero.
Please send any info you want to share to my email address. vk2byf@gmail.com
I am also a Ham Radio operator
Hope to share some ideas and we can learn from each other.
I have a friend Winfried Paul Grundig, who lives in Grenoble.
Cheers Bob
Hi Michel and Bob,
First, thanks a lot for your interest !
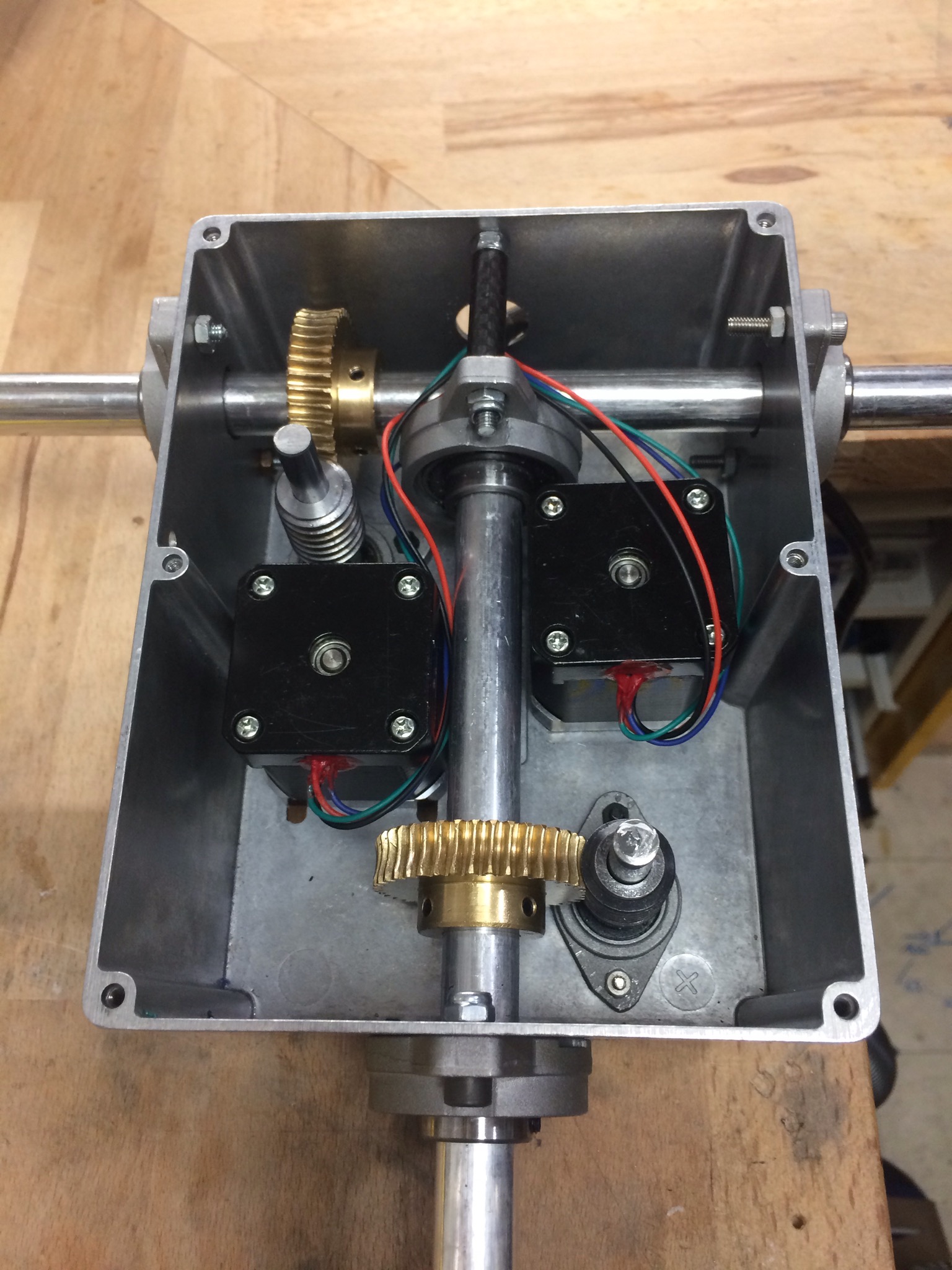
This is another photo of the rotator in construction (not completly finished) (2 block bearing are missing to “fix” the top of the axis of the worm gear)
Bob i will send you today some CAD file, 2D datasheet and more information
Michel if you are also interested for the CAD file and the technical information you can give me your email adress or contact me at hadji.yohan@gmail.com
Michel si tu est aussi intéressé tu peut soit me donner ton adresse email ou bien me contacter à cette adresse : hadji.yohan@gmail.com
Welcome to the community and thanks for sharing your project.
I would suggest you open a repository (maybe in gitlab) and upload there the CAD file(s) and any other info someone needs to build this rotator.
With the repo and with a suitable license (we use CERN Open Hardware Licence v1.2 for Libre Space projects), you will be able to share properly your project, keep track of the changes and the progress and let others easily give feedback, open issues and contributing to your project.
If you need any help with either git or the license, don’t hesitate to ask. Also you can find most of us online in SatNOGS chatting rooms.
Hi Yohan
From the two photos you posted, it looks like the drive from the stepper motors to the worm drive shafts is outside the box via a couple of belts.
How are these belts and pulleys protected from the elements, snow and ice in your case. UV radiation in our case? (Australia)
How are you driving the stepper motors?
Where is the tracking information coming from?
How are you providing antenna position feedback to the tracking controller?
Mine use the LSM303DLHC e-Compass 3-Axis Magnetometer and 3-Axis Accelerometer Module.
Cheers Bob
Hi bob,
You are right the belt are outside, but this is only for the “test & devellopement”, like that this for me more simple to move manually the rotor when he is not powered, in the final version the working would be exacly the same but with the timing pulley and the belt inside the box
For this time I drive the stepper motor with a Arduino Stepper motor driver shield, but it would also be possible to control it with the official satnogs controller pcb
You can controll it with the satnogs soft or with Grpredict in direct, like @quartapound done some time ago
For this time i’m thinking to 2 posibilities, the first is to use stepper motor with encoders and the second is to add like you said a 6 or 9 axis sensor to the head of the antenna connection
This project isn’t finished yet and for this reason all your wish or idea are welcomed !
Thanks to @fredy’s suggestion and in front of the number of ask for CAD or information, I’m thinking to open a repository to upload all the files and the information.
@azisi This parts are from special order on Aliexpress (about 10$/pcs), all the part number and prices etc… will be in a document that I’m actually writing and will be posted on the future GitHub repository !
Hi again,
My repo is online with the first files at : https://github.com/YohanHadji/Yohan-s-Rotator- !
The next files are coming soon with test of the cnc parts during the week
Best regards !
Yohan
Today first observation !!
But some issue… I was thinking that my Raspi 1 could support satnogs task but apparently this is not the case so i can move the rotator but i can’t receive data from the rtl-sdr in the same time…
Hi !
After a week of “real life” test i made some modification and the V2 is available, this one will work better
1/ the stepper, and the worm rod are now the same piece, like that the belt tension is always the same, this wasn’t the case on the V1,
2/ the timing pulley is now 40t, the 60t was overkilled and a bit to big
Files are available on the repo ! (the step version is zipped due to its size)
(I’m actually in discussion with a Chinese aluminium parts producer to estimate the price of the cnc parts, for an example, this would be for this time 4$ for the worm gear, the same price for the worm rod and $2-3 for the stepper-worm rod mounting part)
Antenna Upgrade ! (wimo x-quad 432mhz) obs are really better ! but it looks like 15mm fiberglass axis isn’t good enough to support all this weight…
V3 (work in progress) will be with 30mm Aluminium tube !


 !
!
 so i can move the rotator but i can’t receive data from the rtl-sdr in the same time…
so i can move the rotator but i can’t receive data from the rtl-sdr in the same time…