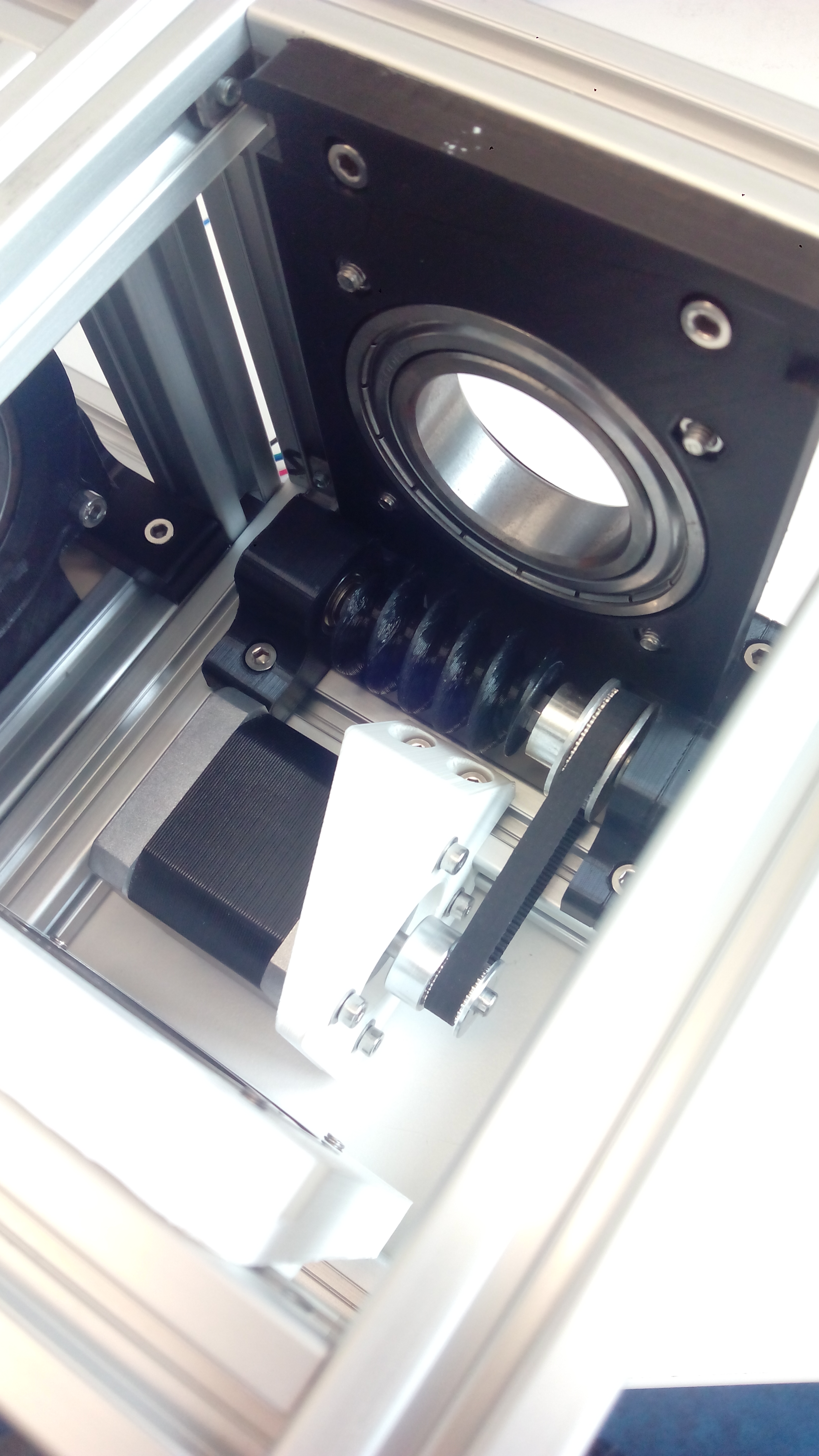
All parts were printed/ordered. At the end of assembly we discover that the axis gear assembly is offset to the axis side assembly. This way, the pipe wont fit through.
Hey, the axis side has oval holes to regulate the distance between the worm gear and axis gear.
Also the connection of two gears is tight because of 3d printer accuracy. In order to put the pipe, loosen the screws of the axis side part.
So what’s the difference between 3.0.1 and 3.1? I’ve printed all the 3.0.1 parts out, but if there’s a newer version, I’d rather proceed with the latest.
I’m building based on stepper motor version. Looks like 3.1 is geared toward DC Motors, encoders, and mechanical end-stop vs the optical version on the 3.01? Looks like there’s not a stepper version of the 3.1 design, but if there is, can you tell me what is different as far as parts / pieces in case I need to re-print something else out?
Just trying to keep from building something that’s already obsolete but I also don’t want to go the DC motor route quite yet either.
I have exactly the same question. Its sooo confusing with different forks using different versions. We printed already some parts that we had to throw away as we got informed that the official repo is outdated… that’s frustrating!
I find it counterintuitive though that the master branch is the one where development takes place. I would assume the master is the latest stable release.
Also, the fact that there is an option for DC or stepper motors is good, but to have it intermixed is confusing. In the assembly doc it mentions when a step is to be ignored, fair enough. But usually I would print all the parts first and then start assembly. By then I already have printed stuff that I will not need.
Another comment: why not include the STL files in the repo? I cant see a reason that they must be separately provided.
Last but definitively not least: I can see there are many updates done on the rotor. Whats missing however is a proper documentation (for the last stable release)! For example, the doc mentions a couple of times that some pictures are from old version - why not update them?
I will keep posting questions here that come up during assembly.
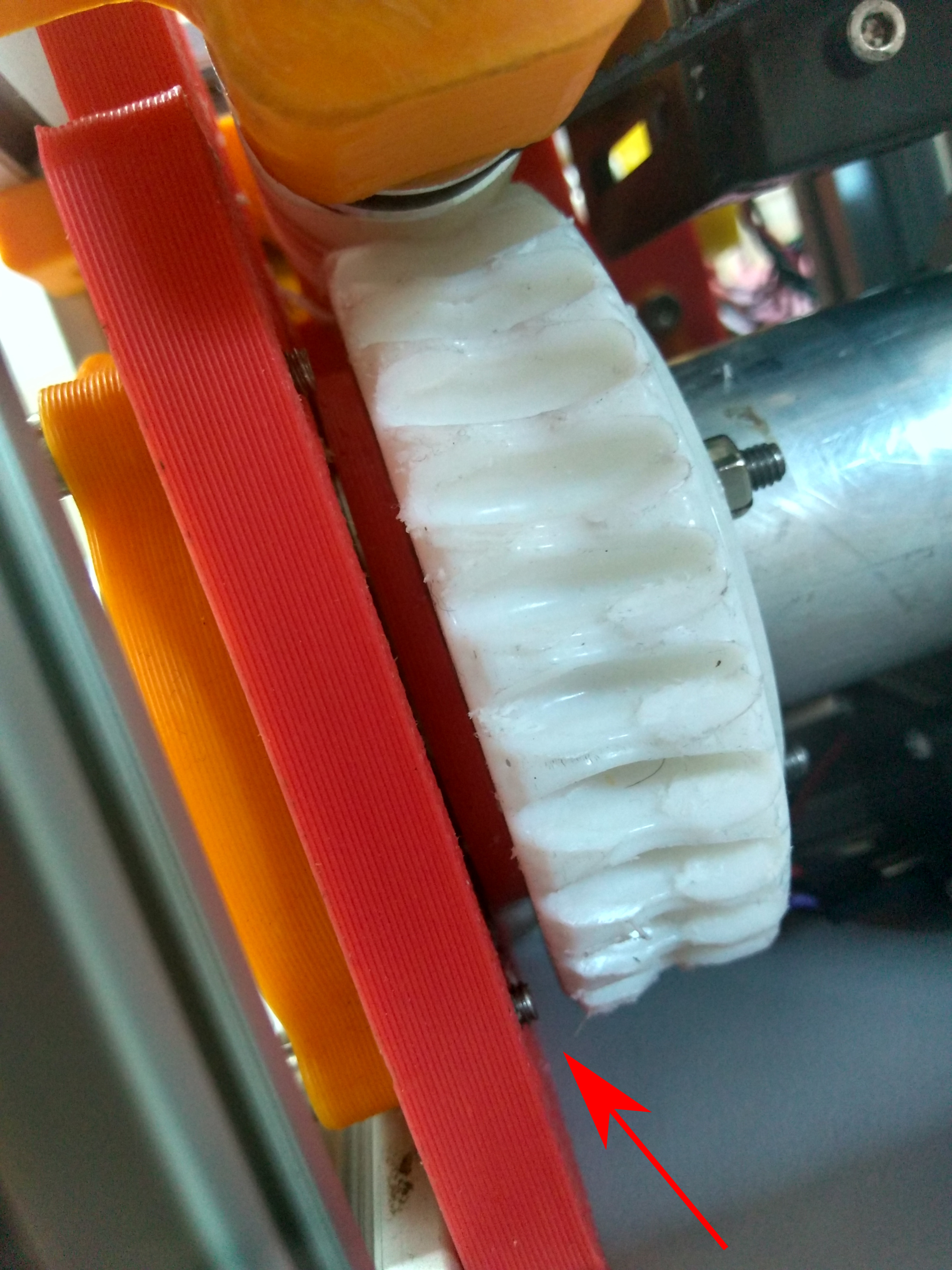
Question 1: In step 3 (side assembly) its says to use M4x20 screws. However, they are too long and will show out about 2 millimeters on the other side. This would scratch the axis gear. Also on the picture in step 5 the screws dont stand out. Whats wrong here?
Typically, branches are created so that development can take place. So, branches should normally never be consider stable. Unfortunately, some self-proclaimed “successful” branching models tried to change that.
Tags on the other hand are created when a certain stability level has been reached and the developers think that the software can be released safely for public use.
In general, the latest stable version is the latest tagged revision.
STLs are not source files. They are derivatives of the actual source files. This is analogous to software source code and binaries ;). Would you distribute binaries in a repo?
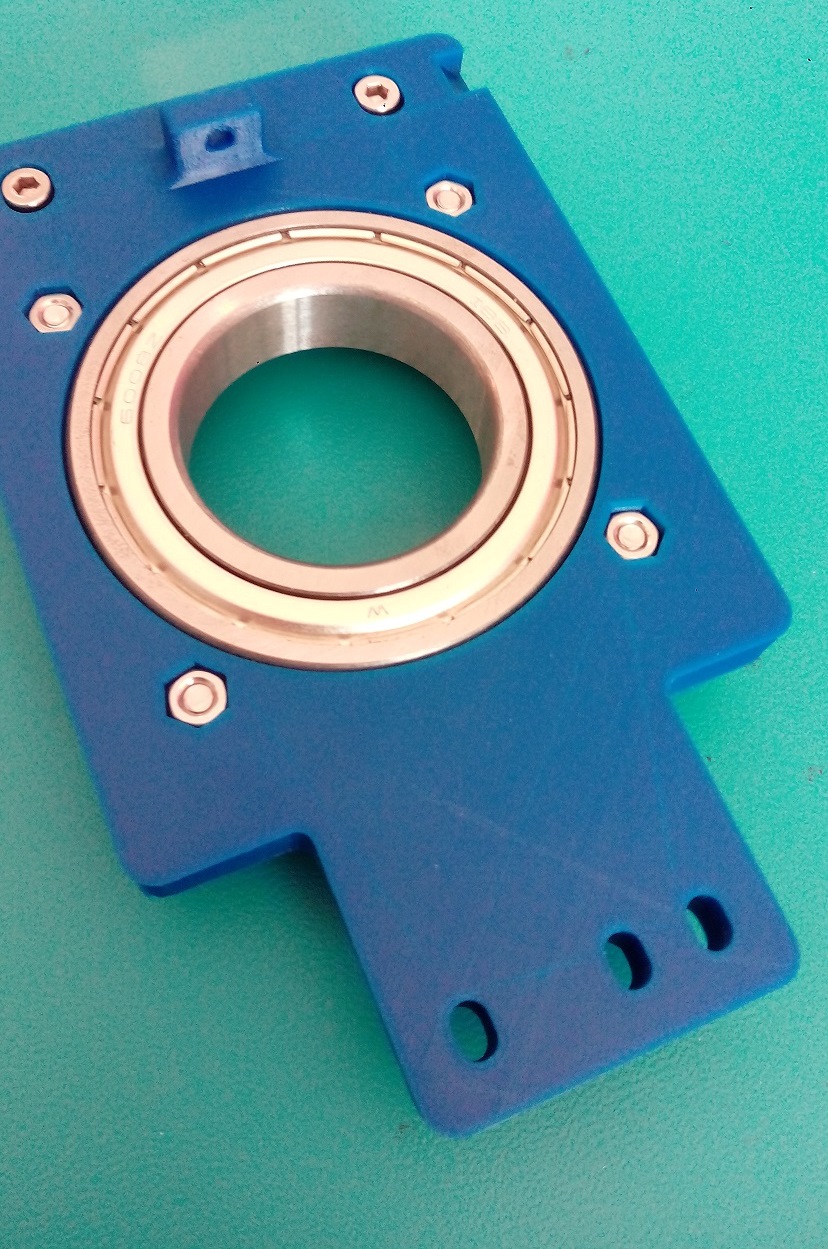
Question 2: We have printed the axis side sensor holder from the 3.0.1 satnogs repo. It looks different from the online documentation (SatNOGS Rotator v3 Mechanical Assembly - SatNOGS), which refers to an previous version of the design.
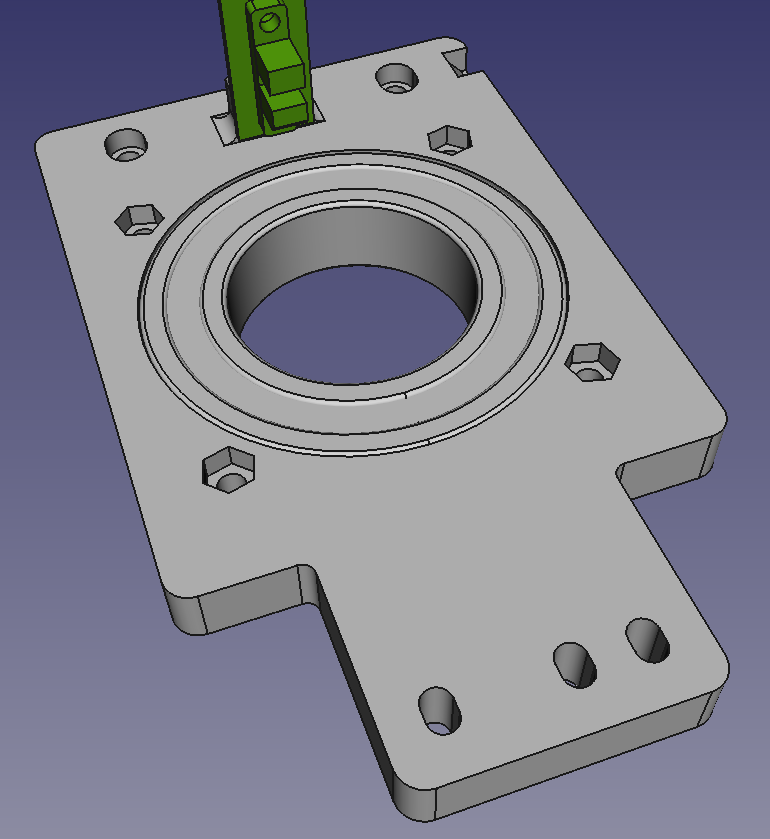
Notice how the print (Picture 1) looks exactly like the CAD design (Picture 2). Good!
What is the purpose of the third hole? Is it a left-over?
In order to build a rotator with DC motors, you need to print an adapter for DC motor, and to build encoders for feedback (firmware isn’t ready for DC motor setup).
We use mechanical endstops, because it works better in sun light, and is more cheaper.
v3.1 support both stepper and DC motors.
When the v3.1 release will be ready, we document which parts are necessary to print in order to go to v3.1
It is necessary to be clear in BOM which parts are for different option, issue #59.
This would not scratch the axis gear. Between axis gear and ball bearing, is axis spacer.
Hi,
we did a new printout of the 3.0.1 version of the parts. Still, pipe won’t fit through. Also loosening the screws on axis side part is not enough. There is still 1-2 mm missing.
And even if (with huge force) we could make the thing go in, then the gears are under very high tension. It seems to me that there is much more tolerance needed for the gear.
Our prints are of decent quality and we followed the documentation closely. Are we the only ones experiencing this problem?
I’m not sure really. I suspect that they were driven the wrong way round too many times and at some point it just gave up. Still I have a static GS running which is ok but I’d like to get this running. I also need a good place to put it,