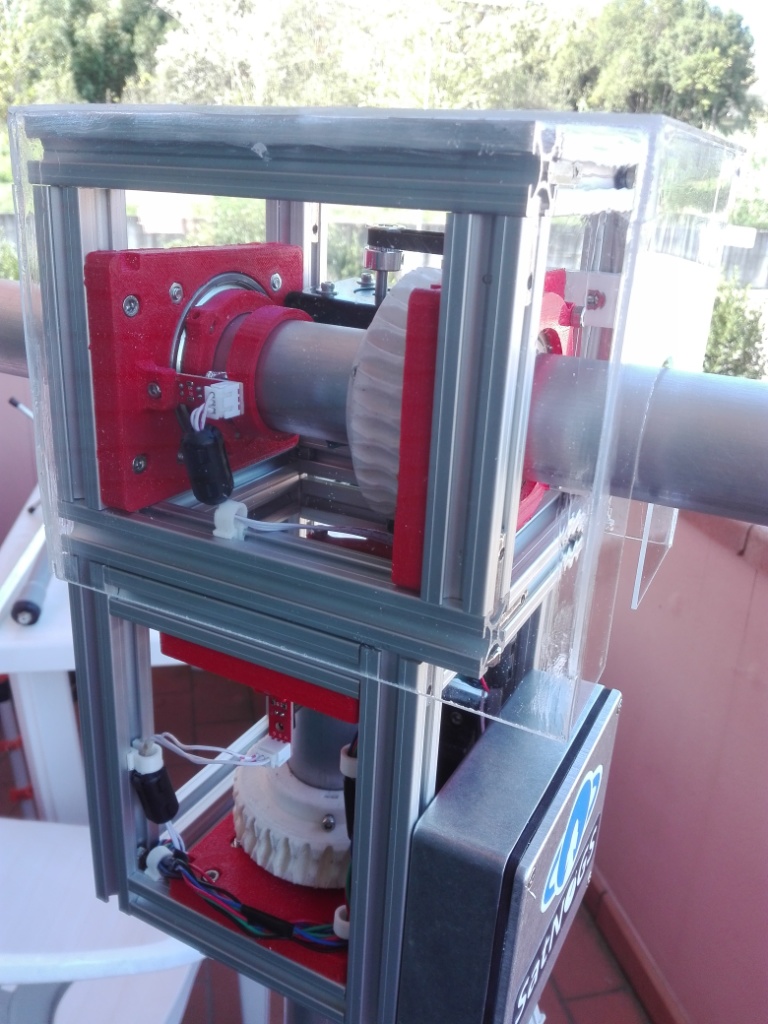
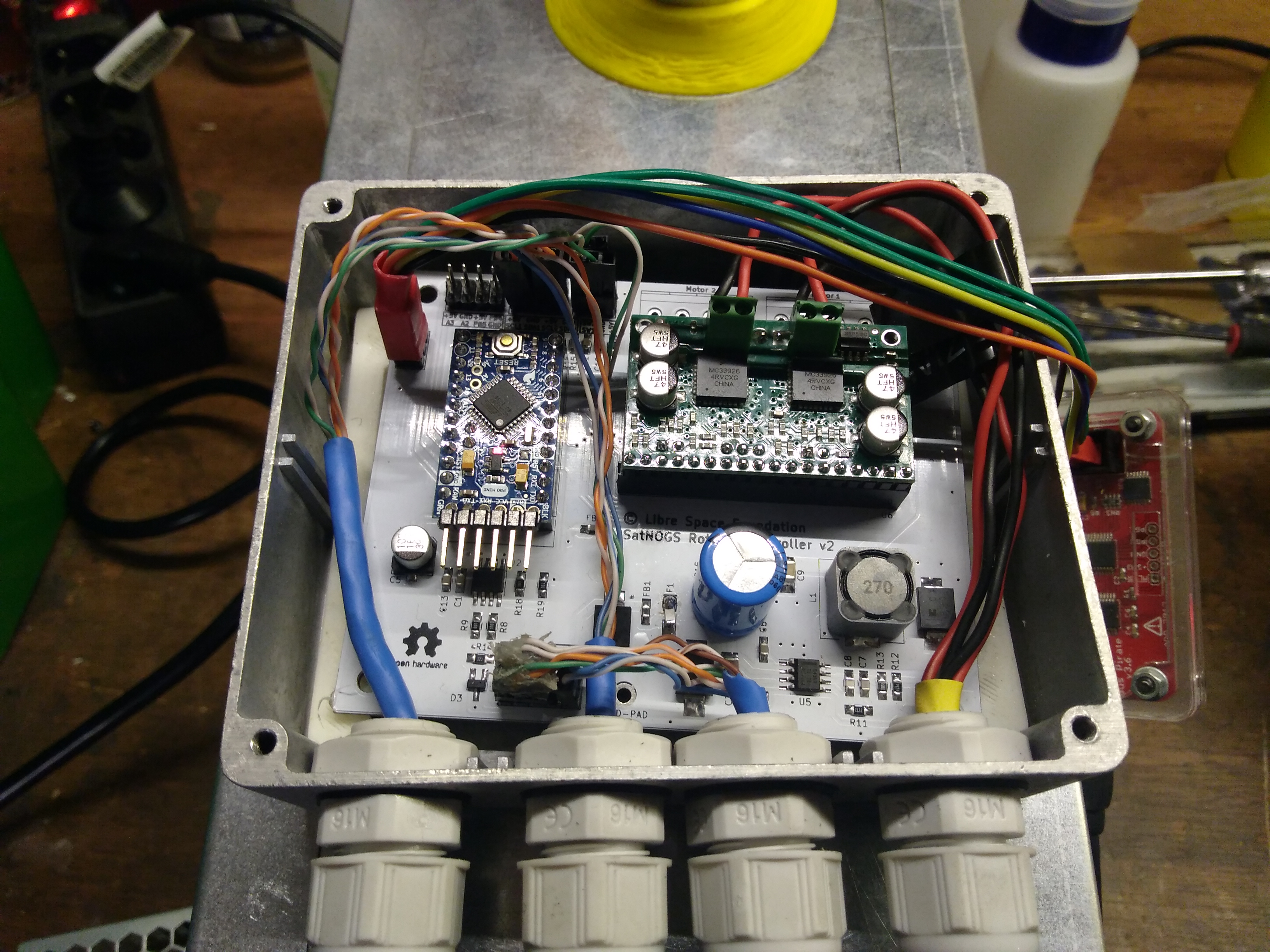
We’ve built both the rotators, and created the rotator controller board. (https://photos.app.goo.gl/9WuyWBMQMkqVhmFQ9 – https://photos.app.goo.gl/gKrqERhN8ehH1bFS8) We’ve tested it with steppers using EasyComm commands through Minicom and they function, and the rotators function with a drill on shaft. However when putting the two together (the rotator with the electrical stuff) we are having issues.
The construction is very constrained and I think it’s putting a lot of strain on the stepper motor. The motor drivers get VERY hot, and while it may rotate things a few times, eventually, it stop working. You can hear the sounds the stepper is making as it tries to move but it’s not moving things. Removing the stepper from the construction entirely and testing it on its own shows that it won’t rotate even with no load on it. I haven’t tested them again long after to see if it was just the drivers overheating, or if the steppers themselves are broken (I’m guessing it’s probably the former though).
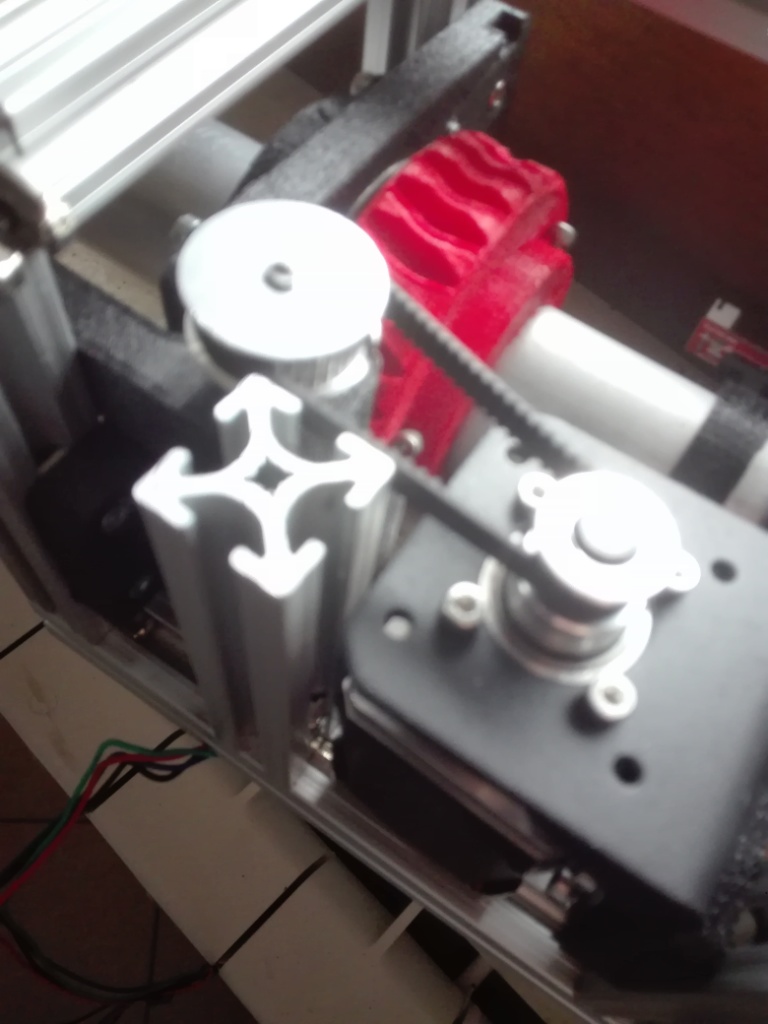
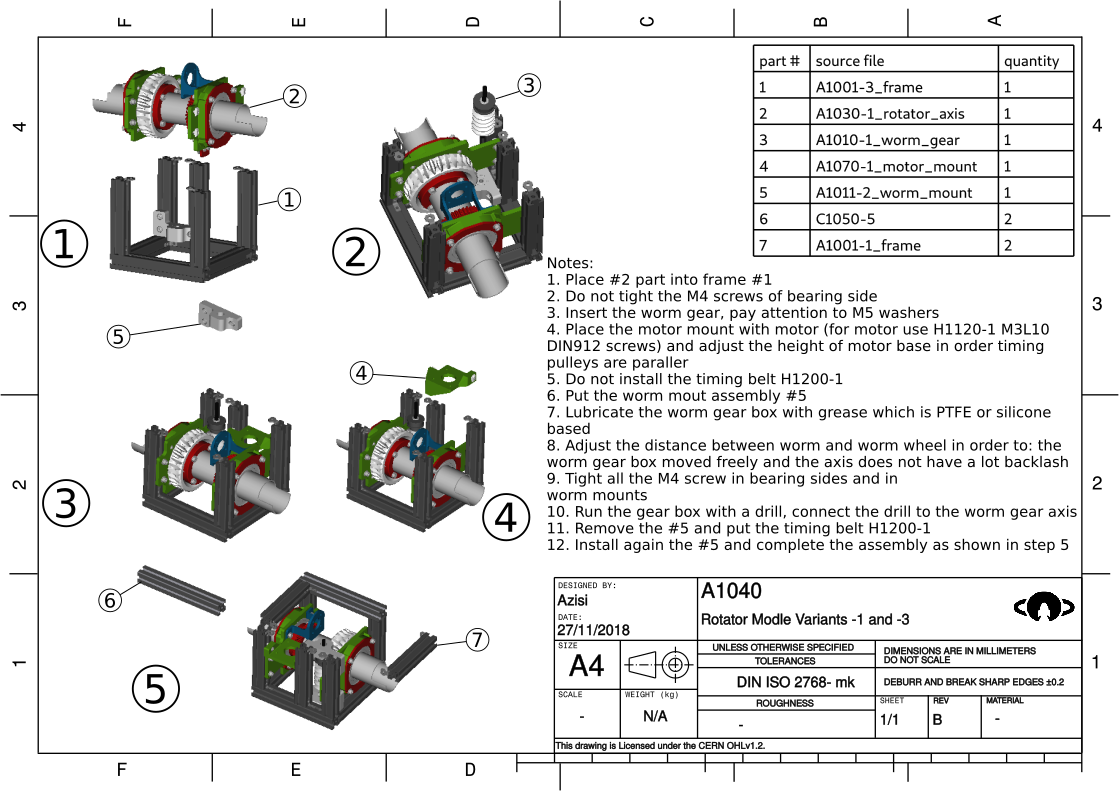
Hello.I think it depends on two things.The first is that the stepper motor you are using does not have enough strength, Project expected about 59 Nm torque but judging by the size you used the 42 Nm ones for 3D printers and therefore do not have enough strength.the second is that from the photos and videos you have put, the cage structure is not fixed well, you should check that the worm gear without a lot of friction on the axis gear, normally you should file the worm gear and turn it in the axis gear with the drill to check if everything runs smoothly and does not create strong friction, otherwise the motor remains blocked, it cannot make the pulley turn.Another important thing is that you have to calibrate the a4988 drivers because if they are not well adjusted they make noise and heat up too much, or they don’t have enough strength, so check that too. When they drive the engine well you can also hear it by ear, normally the stepper motors consume about 0.5, 0.6 Ah (at least mine)I’ll put some photos to make you aware of the difference in construction and assembly
Hello
What do you mean by ‘filing the worm gear’? I don’t really know how it should feel when it turns. The drill will make it move, but it has a lot more force than my steppers. What kind of gear should I set the drill at to make sure that it can accurately show me if there is too much friction or not?
Sorry there is a translation error "filing worm gear"I meant to say that you should check that the worm gear does not have too much friction with the axis gear, in theory you can also check it by turning the worm gear with the 36T pulley mounted and tightened by turning it by hand, to see if it can move or not, otherwise you should sand the plastic a little to have more smoothness between the two gears. (they must also be lubricated with silicone grease).Then check the adjustment potentiometer of the A4988 driver because if the motor is not energized enough it will not work well, if you give it too much energy the motor is rough and makes noise even when in stand by.Otherwise, make a better video, without knowing where the problem is. By now I made 4 of these rotors and I did some construction experience.
Thanks for responding. I think we found that part of the problem might be that the power supply we are using is not sufficient also. Our data sheet for our steppers says 1.7A per phase, and we are using a 1.2 amp 48V power supply. Since we are running both steppers off the same power supply that probably means that we need more than twice 1.7A I’m guessing? The wiki page says a 48V 1A power supply is sufficient, but that doesn’t make sense I don’t think?
We have a 12V 30A switching power supply we might be able to use but the wiki says 19-30V, so I don’t know if that will work also. What kind of power supply are you using for yours? I will try to make a video once I get some time to do so.
Hello.
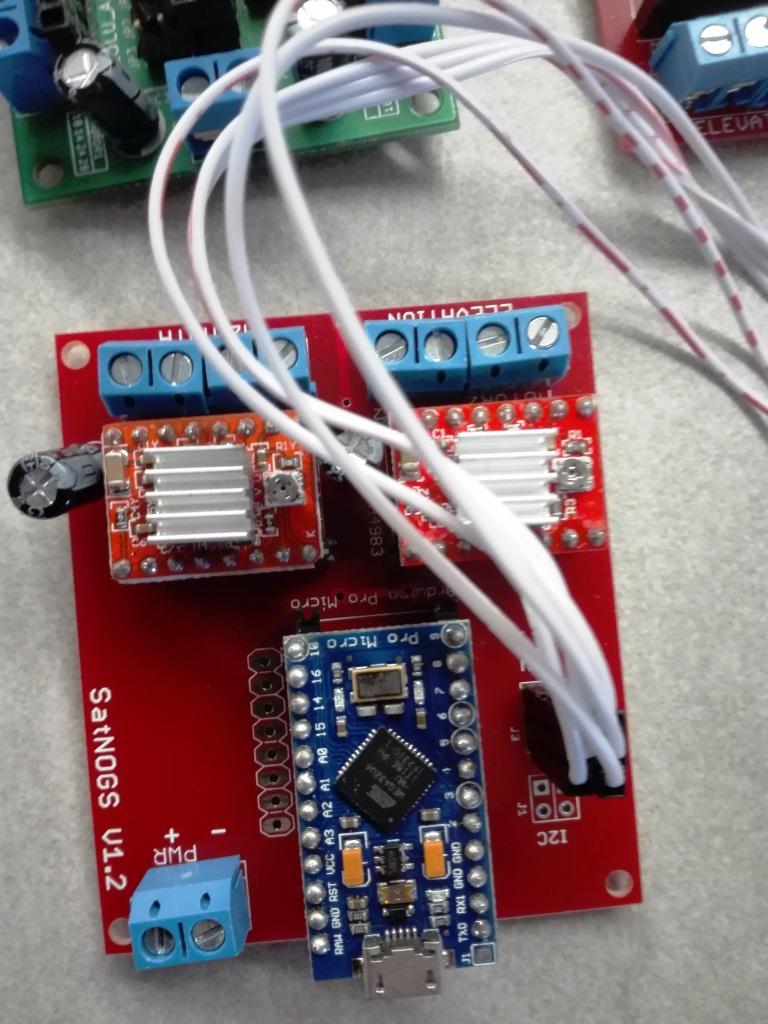
Unfortunately I also had problems with the pcb v 2, in fact for my two rotors I used the pcb v 1.2 which is powered at 12 v and it is enough to easily supply 2-3 amps maximum.
I tested them together on the usual power supply, then 4 stepper motor running simultaneously.
I do not prefer the 48V because it does not allow portability, that is, to have 48 volts you have to be attached to the main power of the house, while with the 12 v you can also use a battery, even in the middle of the desert.
In my opinion the version 1.2 with stepper motor works great without many problems
Thank you for your response! I didn’t know the 1.2 ran only on 12 volts. That might be an interesting route to take on this.
We did figure out the problem though. Due to my inexperience and the data sheet being in Korean or something, the current rating on the data sheet was actually the MAX current rating, so I adjusted the current limit on the motor boards too high and burned out both (actually 4) of my steppers.
Thank you again for your help. I might look into the v1.2 for portability actually because we do make trips into the desert. When I click the Wiki link for it however on the main page it just takes me to the V2 controller wiki. I had trouble finding documentation for it which is why we switched to V2.
I am curious though, where did you purchase that metal project box for the electronics?
Also how far away should I mount the antenna? We have the helical antenna that I think is about 2m long.
Hey!
In station 200, i use v2 board with stepper motors and 48VDC @ 1A as proposed in wiki. I didn’t have any problem with electronics. Also, you can read here more about the rotator and rotator controller.
It seems that the length of stepper motor isn’t 47mm which means less torque.

{kind=link}