Hi @azisi
Yep for this time the design is made to be put in a box (Hammond 1550 H i think) but in the same time i’m working on another one which work with a special box :
On the “market box” version, the block bearing is mounted on this part 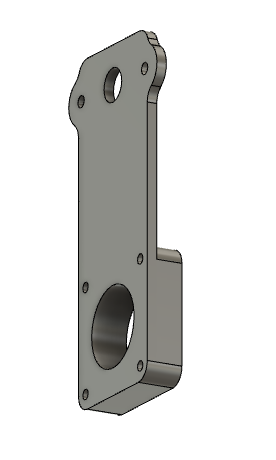
Which make the connection between the stepper and the worm rod
For the mast and for the antennas,
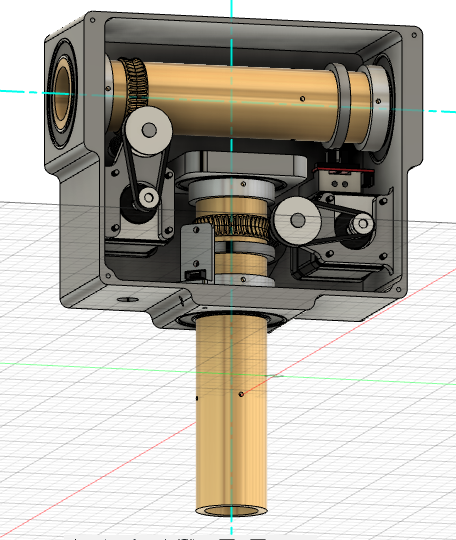
The rod (in black) is fixed by 4 screw to the worm gear/axis (brass color)
I would really like tu put encoders, i didn’t had the time to think to them, for this time i just added optical endstop in my design, but, yeah i could need some help to know how to use them !
About this different box size :
The mechanism is in 4 parts
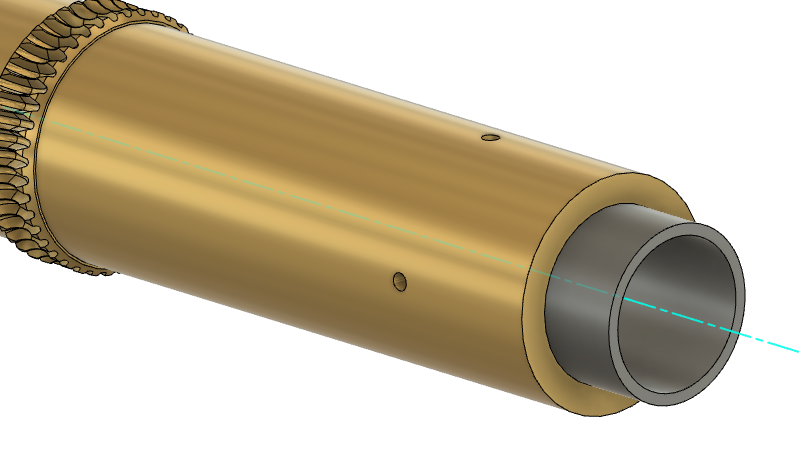
1/ Axis/worm gear + Ball bearing for elevation
2/ Stepper + Timing pulley + Worm rod, (which is mounted in only one “solid” block
And the same for the azimuth
So basically you can mount it a bit as you want (for an example you could just mount it on a plate), the only limit is the length of the axis/worm gear (which is the same parts)
If it could help, it looks like that once mounted in a box
