I am having a problem with Gpredict controlling my EA4TX ARS-USB controller for Azimuth and Elevation rotators
I have them working with hamlib with this rotctl -m 606 -r /dev/ttyACM0, where I can change both the Azimuth and elevation positions.
In Gpredict I have tried putting the Host as /dev/ttyACM0 and also to rotctl in Hamlib /usr/local/bin/rotctl but nothing seems to work.
Is there someone who could please help me, I am new to Linux, Ubuntu, as I am trying to move from Windows 10 completely
Many Thanks
Ian
M0JTL
I also had the firewall to allow incoming and outgoing traffic on ports 4533 (rotctld) and 4532 (rigctld).
Use gufw (sudo apt install gufw) to set this via a GUI.
Done that, now I have 4 rules for incoming and outgoings but still nothing on Gpredict
Gpredict is not even showing the correct readings from both rotators
And check, if the log file (/home/username/.config/Gpredict/logs) says something like that:
2024/06/01 16:44:26|4|rotctld_socket_open: Network socket created successfully
2024/06/01 16:44:26|4|rotctld_socket_open: Connection opened to localhost:4533
Thanks, I will give it a try on the next pass.
I am trying everything out on my Windows setup just to be certain there is not a problem with the hardware side of it, then if it all works I’ll go back to Linux and try everything you suggested
Many Thanks
M0JTL
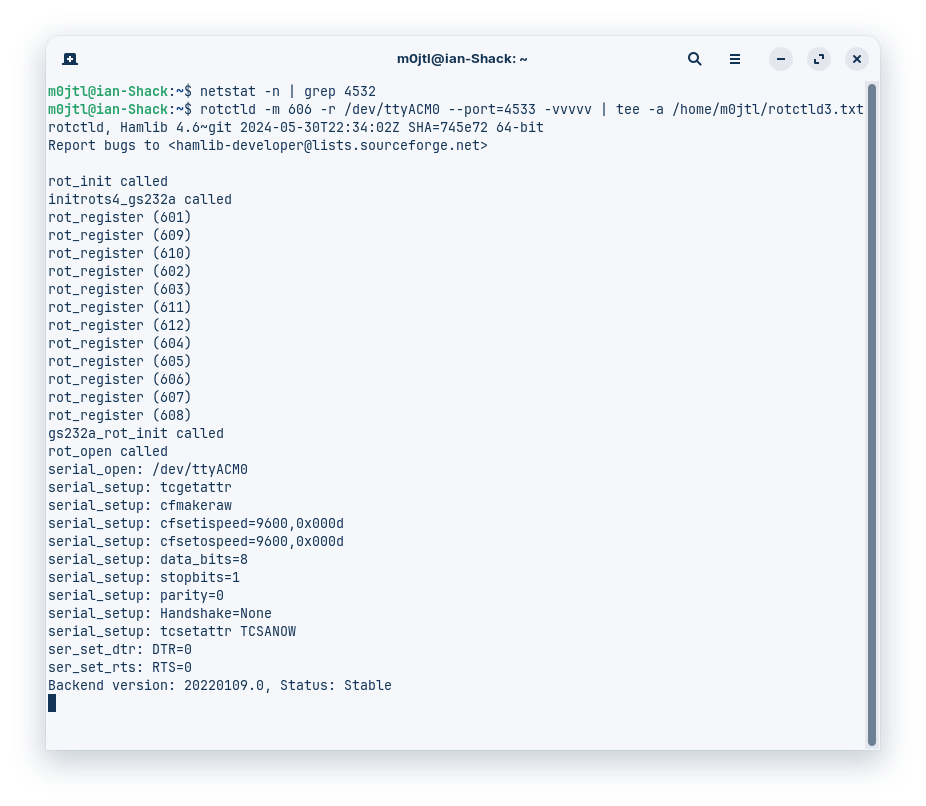
I came back to Linux and tried netstat -n | grep **4533 and I got nothing, then tried rotctld -m 606 -r /dev/ttyACM0 --port=4533 -vvvvv | tee -a /home/m0jtl/rotctld.txt
It made the file but Terminal just sat there and there was nothing in the text file.
Hamlib was not responding to anything so I tried to reinstall it by the following, hope this is correct:
./configure --prefix=/usr/local
make
sudo make install
when I did the sudo make install I got an error:
libtool: error: error: cannot install ‘libhamlib++.la’ to a directory not ending in /usr/local/lib
Like I said I am new to this, so I must be doing something wrong, but not sure what!!
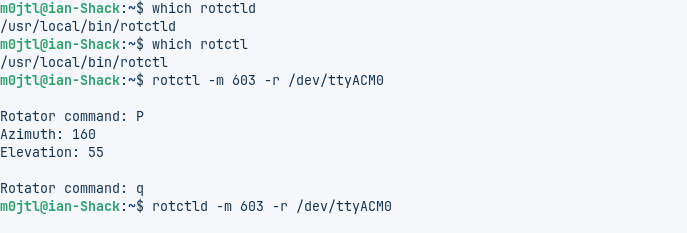
I have just noticed when I put
rotctld -m 606 -r /dev/ttyACM0
into terminal it just sits there with a flashing cursor but when I do the same with
rotctl -m 606 -r /dev/ttyACM0 I can control the rotators, is this right?
This is the output from both the rotctl and rotctld
rotctld -m 606 -r /dev/ttyACM0 --port=4533 -vvvvv | tee -a /home/m0jtl/rotctld.txt
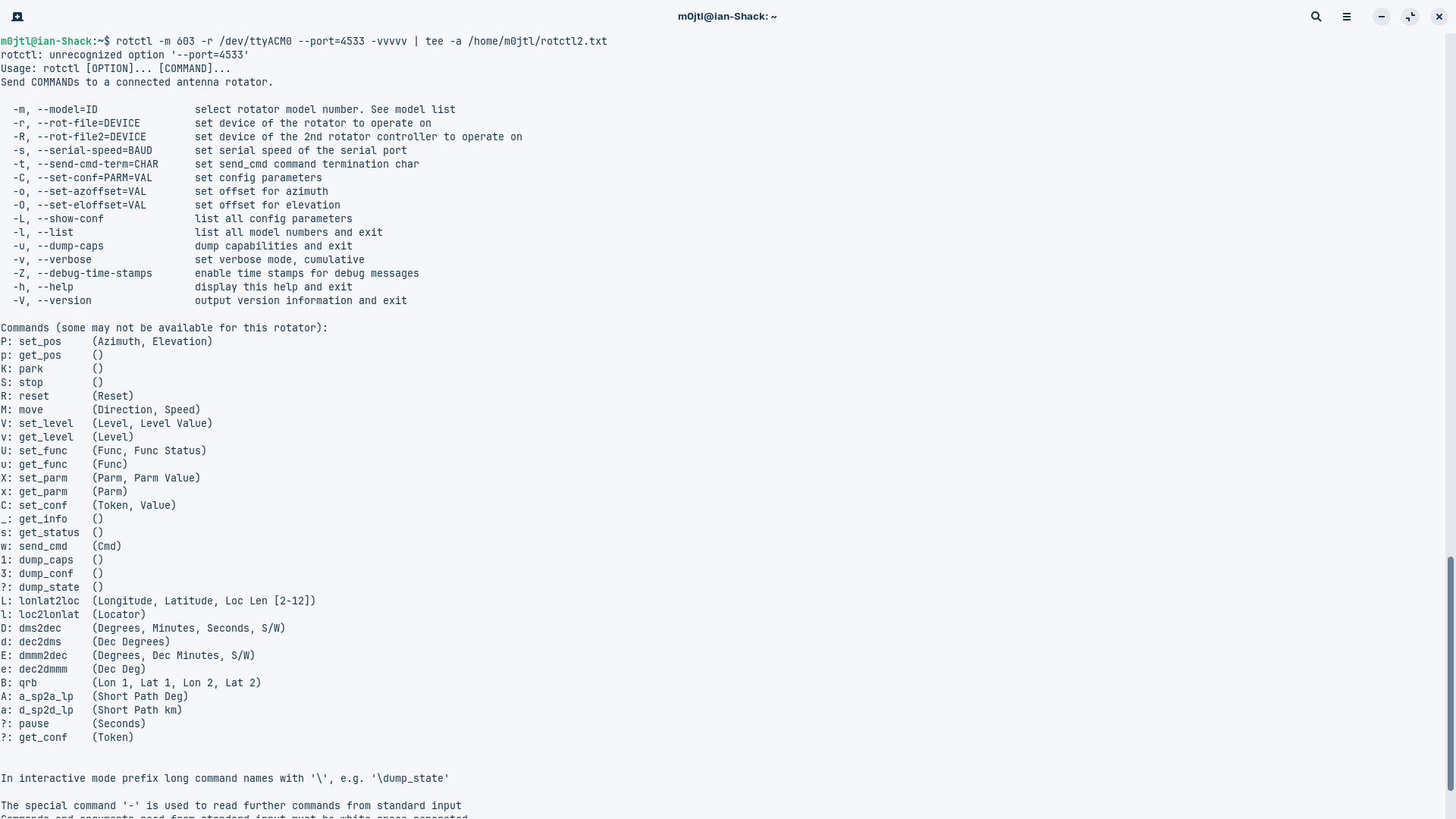
rotctl -m 606 -r /dev/ttyACM0 --port=4533 -vvvvv | tee -a /home/m0jtl/rotctl.txt