Hey guys, I just got my Arduino Uno with V3 CNC Shield (A4988’s) working properly with the rotator firmware, directly connected to PC and Gpredict.
I had to modify Easycomm.h to allow serial communication directly. (although apparently this is not necessary… worked for me.
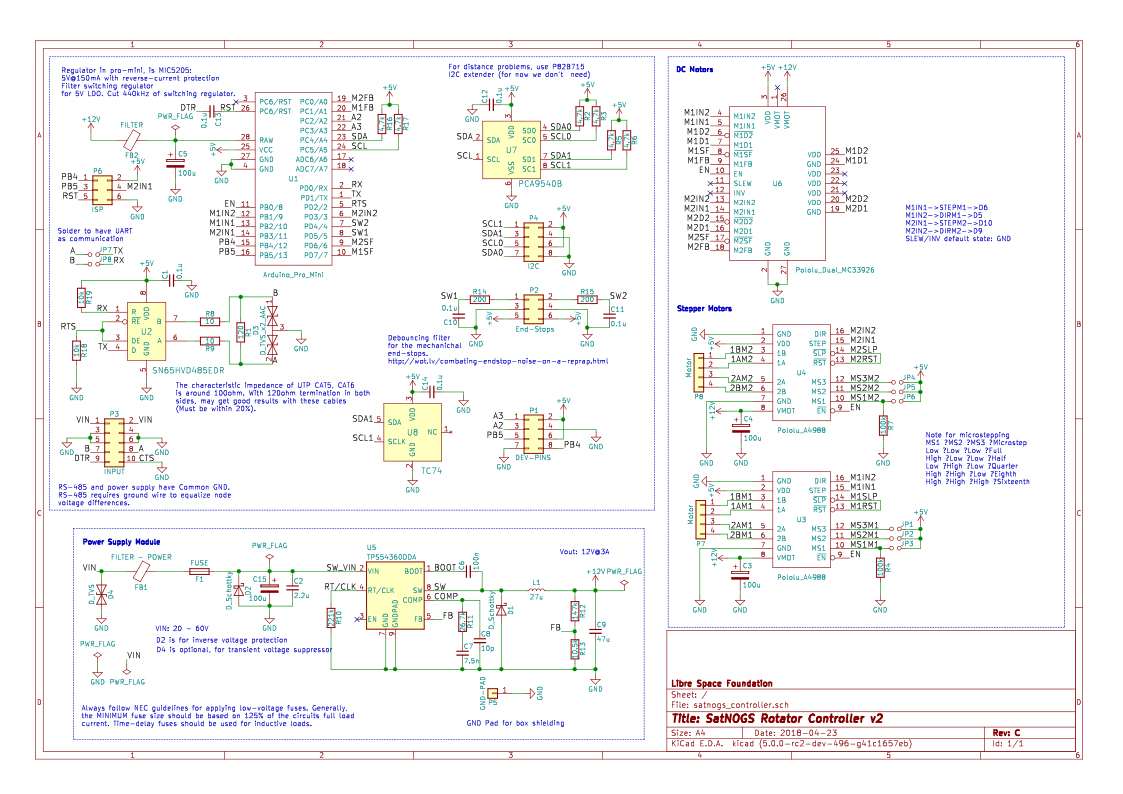
then I modified rotator_pins.h after mapping out which pins went where from the stepper driver to the shield using a DMM on continuity setting.
I also kept looking at the pinouts https://wiki.satnogs.org/images/6/64/Pcb_schema_v2_revC.png
to make sure I was setting things up properly to work with the firmware.
{kind=link}
see my post here