Hello, I did not know whether to post in software or hardware because it seems to be a mix of both. Im building version 2 of the ground station. I have an arduino UNO and shield for the motors (MotorShield v2.3 Adafruit) plus everything else. However i can not seem to find clear instruction for the steps needed about the Arduino. I dont know which pins to use for the endstops either. Any help would be appreciated. I do not want to connect to the satnogs network right now. I simply need it to work in an “offline” capacity if that makes sense. Thank you in advance.
Hey, you can find in satnogs-rotator-controller repository in v1 branch,
#define HOME_AZ 4 //Homing switch for Azimuth
#define HOME_EL 5 //Homing switch for Elevation
We have not prepared instructions about the satnogs-rotator-controller. If you want, you can add in satnogs-wiki documentation and instructions about your configuration.
Alright, thank you. I will document everything.
To anyone: if you want to team up with me to figure this out with me, ill be more than happy to accept the help.
Hello Red, this is my first post here. I too am building a rotator. I am using an Arduino Uno, an Adafruit Motor Shield, 2 nema 23 steppers and i was hoping to send and receive az/el commands via esp8266nodemcu.
So far, i am able to control the rotor movement with simple sketches and all seems to work ok. I followed the directions on the gitlab site as best I could and loaded the ino. Everything seemed fine. I emplement rotctl, then engage the rotator in gpredict and nothing happens. I’m wondering if the motor shield has something to do with it.
Please read this advise twice: you have to use rotcld - with a d at the end.
I hope this helps, otherwise someone else might jump in…
Well, I copied the command directly from the satnogs site. Rotctl is running fine. Predict seems fine. I think its the arduino. I’ll give it a try tho. Thanks.
Ps. I only use linux.
Hey guys, I just got my Arduino Uno with V3 CNC Shield (A4988’s) working properly with the rotator firmware, directly connected to PC and Gpredict.
I had to modify Easycomm.h to allow serial communication directly. (although apparently this is not necessary… worked for me.
then I modified rotator_pins.h after mapping out which pins went where from the stepper driver to the shield using a DMM on continuity setting.
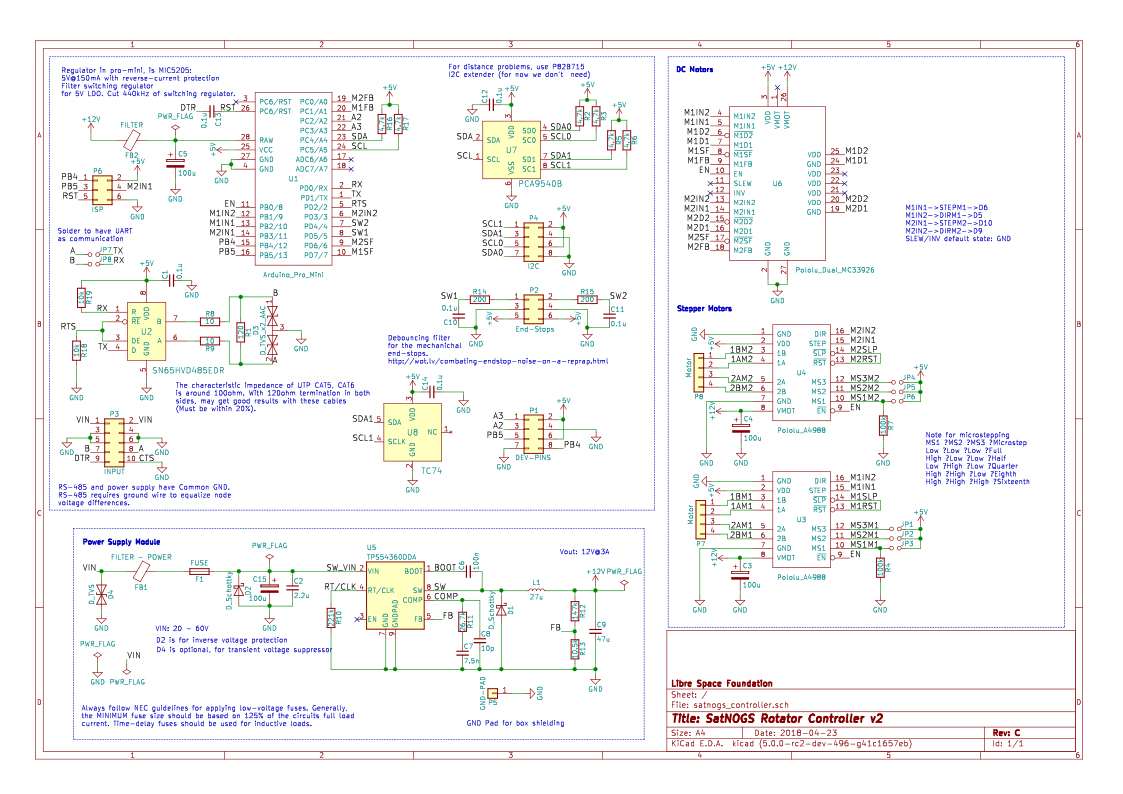
I also kept looking at the pinouts https://wiki.satnogs.org/images/6/64/Pcb_schema_v2_revC.png
to make sure I was setting things up properly to work with the firmware.
{kind=link}
see my post here
1 Like