Thx,
Indeed I try several change in the cmd line, finally I arrived to “”
Now when I run the line (server with rotctld) and Gpredict I have this ::
babare@CSU:~$ sudo rotctld -m 603 -r /dev/ttyUSB1 -s 9600 -t 4533 --set-conf=write_delay=50 -vvvvvv
rotctld, Hamlib 3.3
Report bugs to hamlib-developer@lists.sourceforge.net
rot_init called
initrots3_gs232a called
rot_register (601)
rot_register (603)
rot_register (602)
rot_register (604)
rot_token_lookup called
rot_confparam_lookup called
rot_set_conf called
rot_confparam_lookup called
rot_set_conf: write_delay=‘50’
frontrot_set_conf called
rot_open called
serial_open called
serial_setup called
Opened rot model 603, ‘GS-232B’
rig_strstatus called
Backend version: 0.2, Status: Beta
Connection opened from localhost:46594
rotctl(d): p ‘’ ‘’ ‘’ ‘’
rot_get_position called
gs232b_rot_get_position called
serial_flush called
write_block called
write_block(): TX 3 bytes
0000 43 32 0d C2
read_string called
read_string(): Timed out 0.400440 seconds after 0 chars
serial_flush called
write_block called
write_block(): TX 3 bytes
0000 43 32 0d C2.
read_string called
read_string(): Timed out 0.400512 seconds after 0 chars
serial_flush called
write_block called
write_block(): TX 3 bytes
0000 43 32 0d C2.
read_string called
read_string(): Timed out 0.400520 seconds after 0 chars
serial_flush called
write_block called
write_block(): TX 3 bytes
0000 43 32 0d C2.
read_string called
read_string(): Timed out 0.400370 seconds after 0 chars
rotctl(d): P ‘243.52’ ‘8.87’ ‘’ ‘’
rot_set_position called
gs232b_rot_set_position called: 243.520004 8.870000
serial_flush called
write_block called
write_block(): TX 9 bytes
0000 57 32 34 34 20 30 30 39 0d W244 009.
read_string called
read_string(): Timed out 0.400438 seconds after 0 chars
serial_flush called
write_block called
write_block(): TX 9 bytes
0000 57 32 34 34 20 30 30 39 0d W244 009.
read_string called
read_string(): Timed out 0.400443 seconds after 0 chars
serial_flush called
write_block called
write_block(): TX 9 bytes
0000 57 32 34 34 20 30 30 39 0d W244 009.
read_string called
read_string(): Timed out 0.400473 seconds after 0 chars
serial_flush called
write_block called
write_block(): TX 9 bytes
0000 57 32 34 34 20 30 30 39 0d W244 009.
read_string called
read_string(): Timed out 0.400430 seconds after 0 chars
rotctl(d): S ‘’ ‘’ ‘’ ‘’
rot_stop called
gs232b_rot_stop called
serial_flush called
write_block called
write_block(): TX 2 bytes
0000 53 0d S.
read_string called
read_string(): Timed out 0.400519 seconds after 0 chars
serial_flush called
write_block called
write_block(): TX 2 bytes
0000 53 0d S.
read_string called
read_string(): Timed out 0.400511 seconds after 0 chars
serial_flush called
write_block called
write_block(): TX 2 bytes
0000 53 0d S.
read_string called
read_string(): Timed out 0.400577 seconds after 0 chars
serial_flush called
write_block called
write_block(): TX 2 bytes
0000 53 0d S.
read_string called
read_string(): Timed out 0.400441 seconds after 0 chars
rotctl(d): p ‘’ ‘’ ‘’ ‘’
rot_get_position called
gs232b_rot_get_position called
serial_flush called
write_block called
write_block(): TX 3 bytes
0000 43 32 0d C2.
read_string called
read_string(): Timed out 0.400315 seconds after 0 chars
serial_flush called
write_block called
write_block(): TX 3 bytes
0000 43 32 0d C2.
read_string called
read_string(): Timed out 0.400437 seconds after 0 chars
serial_flush called
write_block called
write_block(): TX 3 bytes
0000 43 32 0d C2.
read_string called
read_string(): Timed out 0.400478 seconds after 0 chars
serial_flush called
write_block called
write_block(): TX 3 bytes
0000 43 32 0d C2.
read_string called
read_string(): Timed out 0.400476 seconds after 0 chars
Connection closed from localhost:46594
^C
babare@CSU:~$
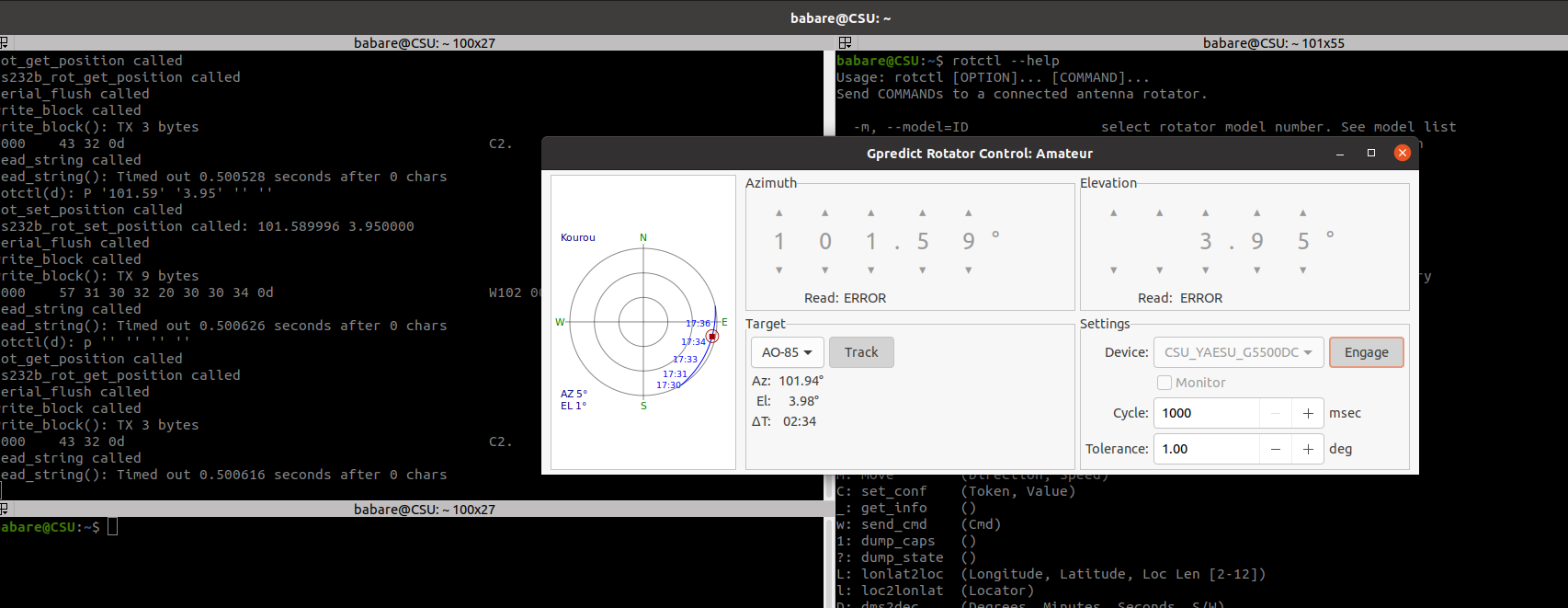
As we can see in increasing order, the GS_232_B (603 model) is reconized and I add delay with set_pram_conf for 50ms. The sever opens by localhost 46594 and it is able to call the rot_get_position function.
After that the same string is call and print every 0,4 second 4 times, why 4 time ? I dont know (baudrate is specified at 9600)
Then the data for position is arrived and 9 bytes of data are read and targeting W 244 (Azy) 009 (El) for 4 time also.
Then 4 times of Stop read with the S and then again 4 time of C2 ..... and the connection go off ....
I really dont understand why each times there is 4 retry even if i put -C retry=2 for exemple,
Do you have an idea, because the target is finally never get reached and I have to re engaged the rotor each time for 4 times of mooving .....
I hope I'm clear,
Thank you really much,
Vivien