EDIT 2: This is a split from Observation 121974: NOAA 15 (25338) in order to discuss what should happen when a scheduled observation has old TLE.
EDIT: I didn’t see @cgbsat answer before writing mine… then probably there was an error on TLEs values and not what I describe bellow…
I did a quick check and the issue was 99% the wrong TLEs. Scheduling has been done before TLEs update.
As we don’t change TLE of a scheduled observation and given that observations are added manually 0h-24h before, satellites that change frequently their orbit and their TLE like NOAA and ISS will face similar issues from time to time.
Maybe changing TLE in scheduled observation would help but we need to consider that changing TLE means that there would be a change on start/end time. This mean that changing TLE could mean overlapping observations. Of course this can be solved by having leave space between the observations.
Other solution would be, when the automated scheduling is active, to schedule observations minutes before they happen.
I suggest we open a new thread under software category to discuss this matter.
@fredy; I did not see a new thread so I’ll give my view on this here.
First off, this topic also touches on the current limit of how far into the future we can schedule observations for.
I’d be in favour of allowing users to schedule observations up to a few days in advance. I agree that this introduces the risk that the TLE used for scheduling may not be accurate, but that will only really lead to problems with the ISS, as all other satellites tracked by SATNOGS either can not manouvre or manouvre only rarely.
However, I would suggest that when a scheduled observation is observed, the most recent TLE is used. This to prevent that if the current orbit is different from when the observation was scheduled, at least the Doppler corrections are correct. The only risk would be that the satellite is late or early with respect to the scheduled start and stop times, and hence that the beginning or end of the pass are missed. This approach also means that ground stations using a rotor will track the most recent position of the satellite, not the position based on a possibly outdated TLE.
A possible way of dealing with the uncertainty in the scheduled start/stop times vs the actual ones would be to add additional time before/after each pass (i.e. a few percent), and have this time increase for passes scheduled further in the future, or for objects known to manouver more.
These were exactly my thoughts on this matter. So, let’s summarize the problem and the possible solutions.
The problem is that when an observation is scheduled early it uses the current TLE which could be changed until the time that observation will run.
The easiest solution would be to keep the same window and just change the TLE in order to get what we will manage to get but with the right frequency. I think that this should be implemented in the first stage.
The hard solution is to re-calculate the pass and set new start and end time for the observation. This is hard because in the same station there could be other scheduled observation and that could create overlapped observations.
In order to avoid this we should extend the scheduled time by some minutes/seconds? before/after?. This way we will be able to change easier the observation without any overlap.
I think that for this we will need some data from an analysis on how much start and end time is affected by changed TLE. As @cgbsat noted for satellites without correction of their orbit we shouldn’t expect any big change, but for the other ones like ISS and NOAA maybe is big enough.
I’m very interested in such an analysis, I’ll try to perform one the following week if I spare some time.
Another aspect is that while scheduling is done manually we want to be able to schedule for a couple of days. However when auto-scheduling is ready, the scheduling would be done a couple of hours before the observation, increasing the chances that the station has the right TLE.
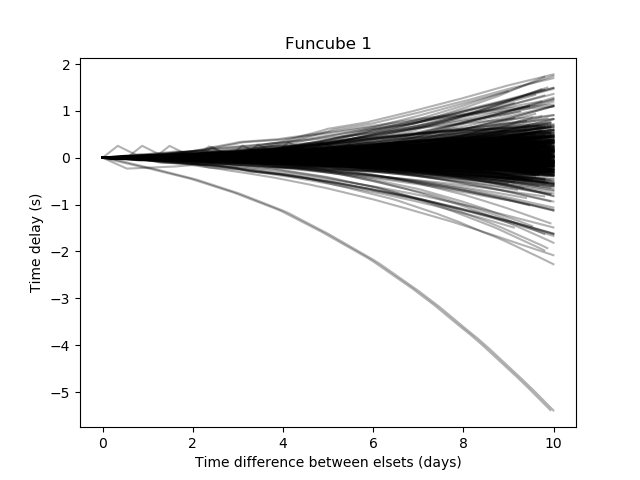
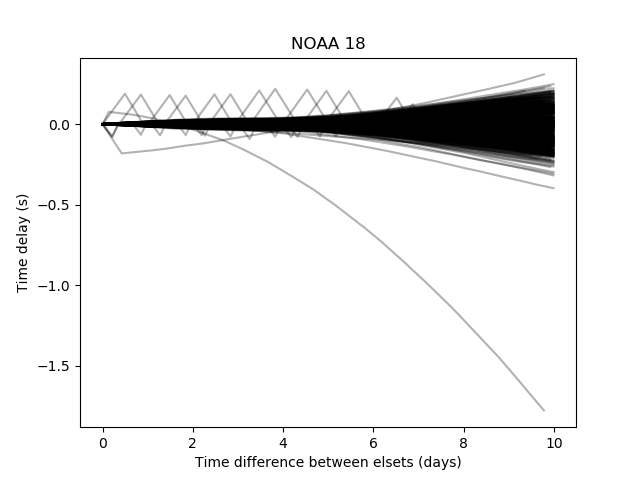
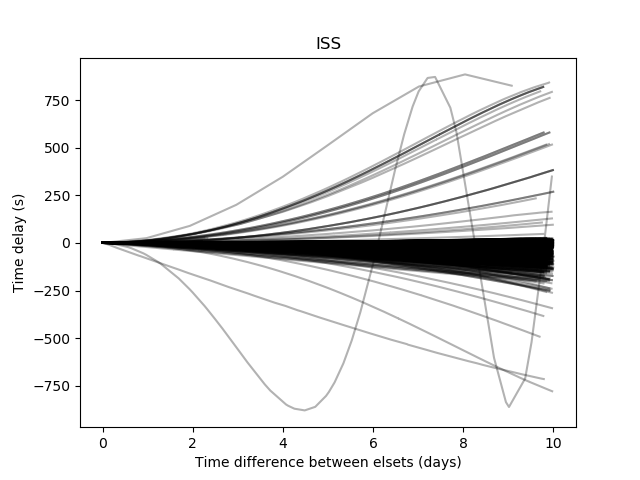
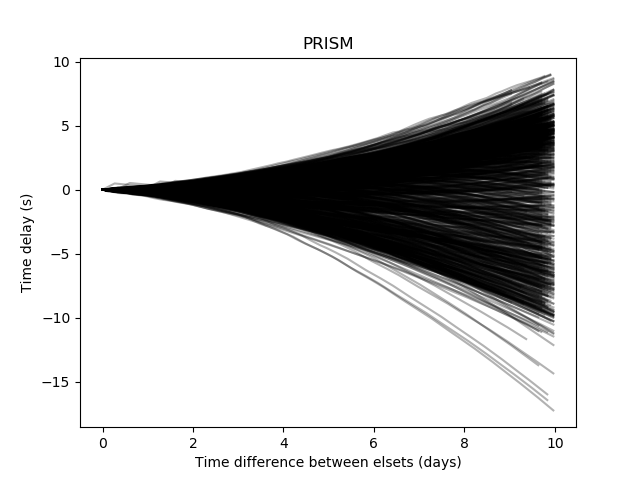
Here’s an attempt to quantify the stability of TLEs. For four objects I’ve taken all JSpOC elsets from 2017 and computed the predicted position and velocity at the epoch of the next ones. The difference in position is then projected onto the velocity vector to convert the position difference in how much in the time satellite arrives early or late.
The plots below show how early or late a satellite is for all those TLEs over a period of 10 days. We see that for most the difference is actually quite small, a few seconds, while for the ISS there are large deviations due to boosts of the orbit.
My feeling is that we can easily identify which satellites are likely to manoeuvrer, and either limit the time span for which future observations can be planned, or increase the timeslot for that scheduled observation.
I expected something like that for ISS, but to be honest, I didn’t expect so small difference for NOAA. Interesting results for PRISM and and funcube 1 too.
I think a solution in the middle would be the ideal. So, not letting satellites like ISS to be scheduled in the far future and increasing the timeslot of the observation, depending on how far it is from now and for which satellite.
Maybe we can have an analysis like the one above to form these limits dynamically.