Hello guys,
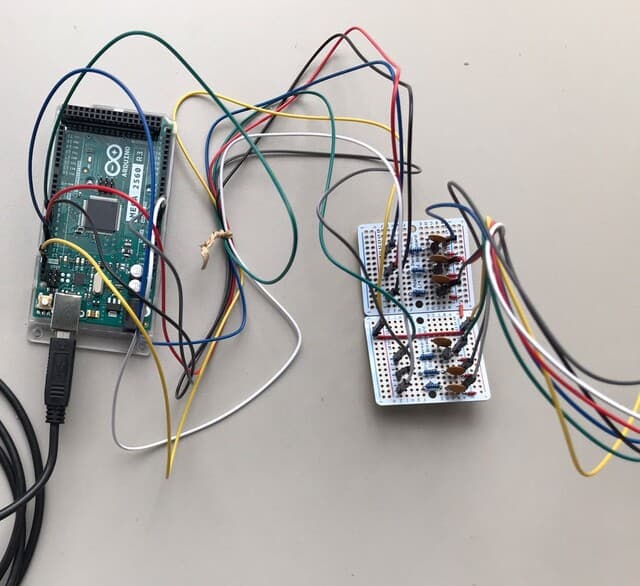
I have a question about wiring, types of cables, and calibration. I have a system for moving antennas using rotctld and K3GN rotator controller code, composed of a Yaesu G5500 DC, Arduino Mega 2560, two protoboards, Dupont wires connecting the external port of the Yaesu control box.
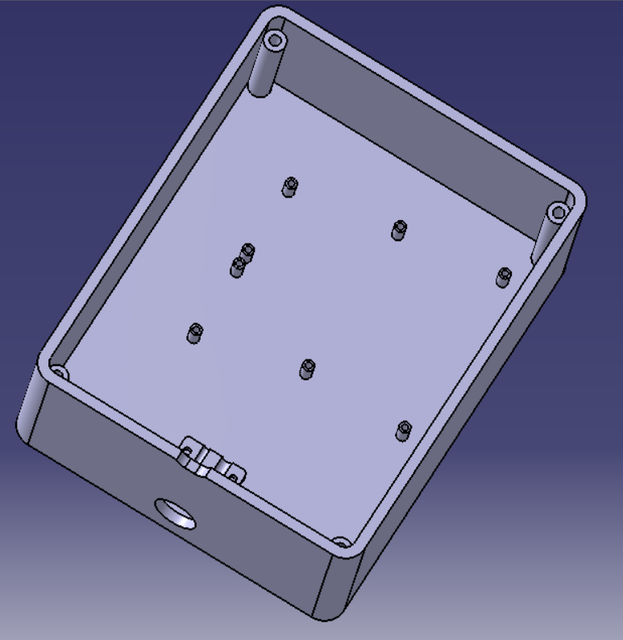
My problem lies in that every time I move or transport the protoboard/Arduino assembly, the azimuth and elevation values become uncalibrated. I confirm this when extracting the current azimuth and elevation positions using the command “rotctl -m 603 -r /dev/ttyACM0” and the “p” command in the Ubuntu terminal. So, I have to calibrate the “OUT VOLTAGE ADJ.” potentiometer behind the control box so that the needles and the values in the terminal coincide. What can I do? Should I change the cables to stronger ones? What could be causing this constant miscalibration? Could it be the soldering? I have created and printed this 3D case to fix the Arduino and the protoboard in place, but I fear I will always have to be adjusting the OUT VOLTAGE ADJ.
Thanks in advance
Images:
Arduino/protoboard setup:

Case to fix the Arduino and the protoboard in place: