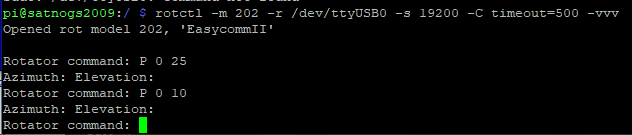
Hi. I’m running into issues with trying to get my station back up and running. I have full control of my rotor through “putty” with the command “rotctl -m 202 -r /dev/ttyUSB0 -s 19200 -C timeout=500 -vvv” But when i use the Satnogs Software it fails to start the rotor for an observation.
Any help would be appreciated.
INFO satnogsclient.scheduler.tasks Received job for observation 11324450, starting at 2025-03-30T20:17:46+00:00
INFO satnogsclient.observer.observer Begin observation 11324450 …
rot_init called
initrots4_easycomm called
rot_register (201)
rot_register (202)
rot_register (204)
rot_open called
serial_open called serial_open: Unable to open /dev/ttyUSB0 - No such file or directory
rot_get_position called
rot_set_position called az=333.42 el=19.94
rig_init: rig does not have rx_range!!
network_open: hoststr=rigctld, portstr=4532
INFO satnogsclient.observer.observer Start gnuradio thread.
Found Rafael Micro R820T tuner
[INFO] Opening Generic RTL2832U OEM :: 00000001…
Found Rafael Micro R820T tuner
[INFO] Using format CF32.
/var/lib/satnogs-client/.gnuradio/prefs/vmcircbuf_default_factory: No such file or directory
vmcircbuf_createfilemapping: createfilemapping is not available
Allocating 15 zero-copy buffers
netrigctl_close: done status=Command completed successfully
INFO satnogsclient.observer.observer Observation 11324450 finished.
INFO satnogsclient.scheduler.tasks Upload successful.
INFO satnogsclient.scheduler.tasks Upload successful.
Whe you say fresh install, I’m assuming the new stack with docker.
In that case, read this thread and the proposed solutions.
We haven’t completed allt the rotator details in the new stack, so for instance the device mapping is missing.
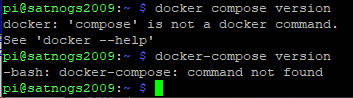
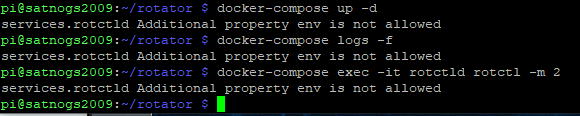
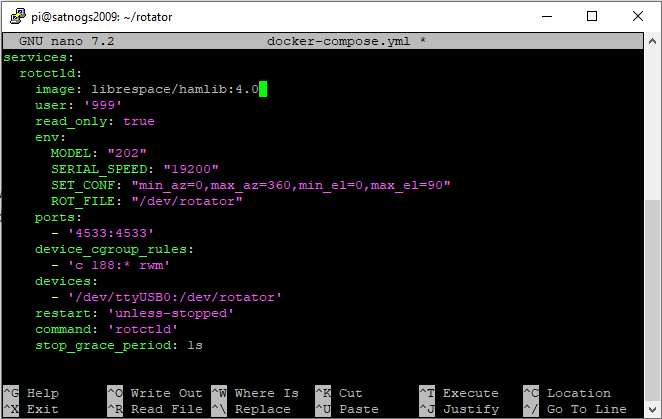
Having followed the link and read the instructions. I’ve created the Folder and put the file inside it. I then edited the file to reflect my settings and baud rate but i have a feeling I’m not fully understanding the workflow. When i run the docker commands it does nothing.
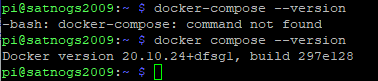
hmm, that is a bit odd, I thought that was installed in the new stack…
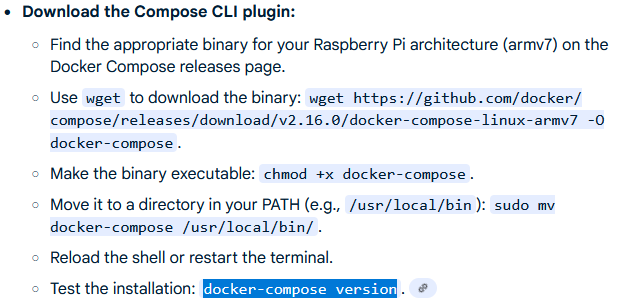
you can use my script that fetches the latest of compose & buildx in the local users ~/.docker/
Because if you haven’t figured out already i have no idea what I’m doing. I’m at a total loss and trying to fumble my way through this software to get a station on the air which I’ve been able to do in the past and I’d like to try and do again.
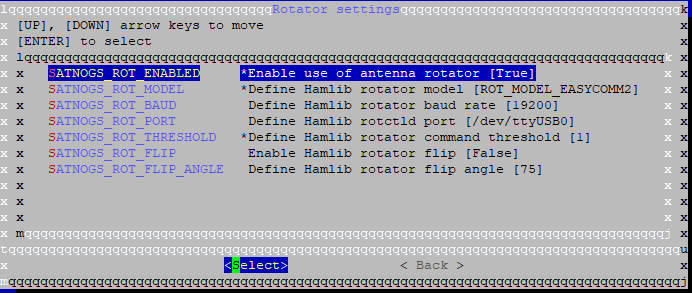
It’s not as easy as it seems from the Wiki to get the Rotor section up and running. I can easily get the software to run and make Observations but i’d like to take it a step further with a Rotor.
Maybe i should wait until you complete the Docker image to include the working Rotor section.