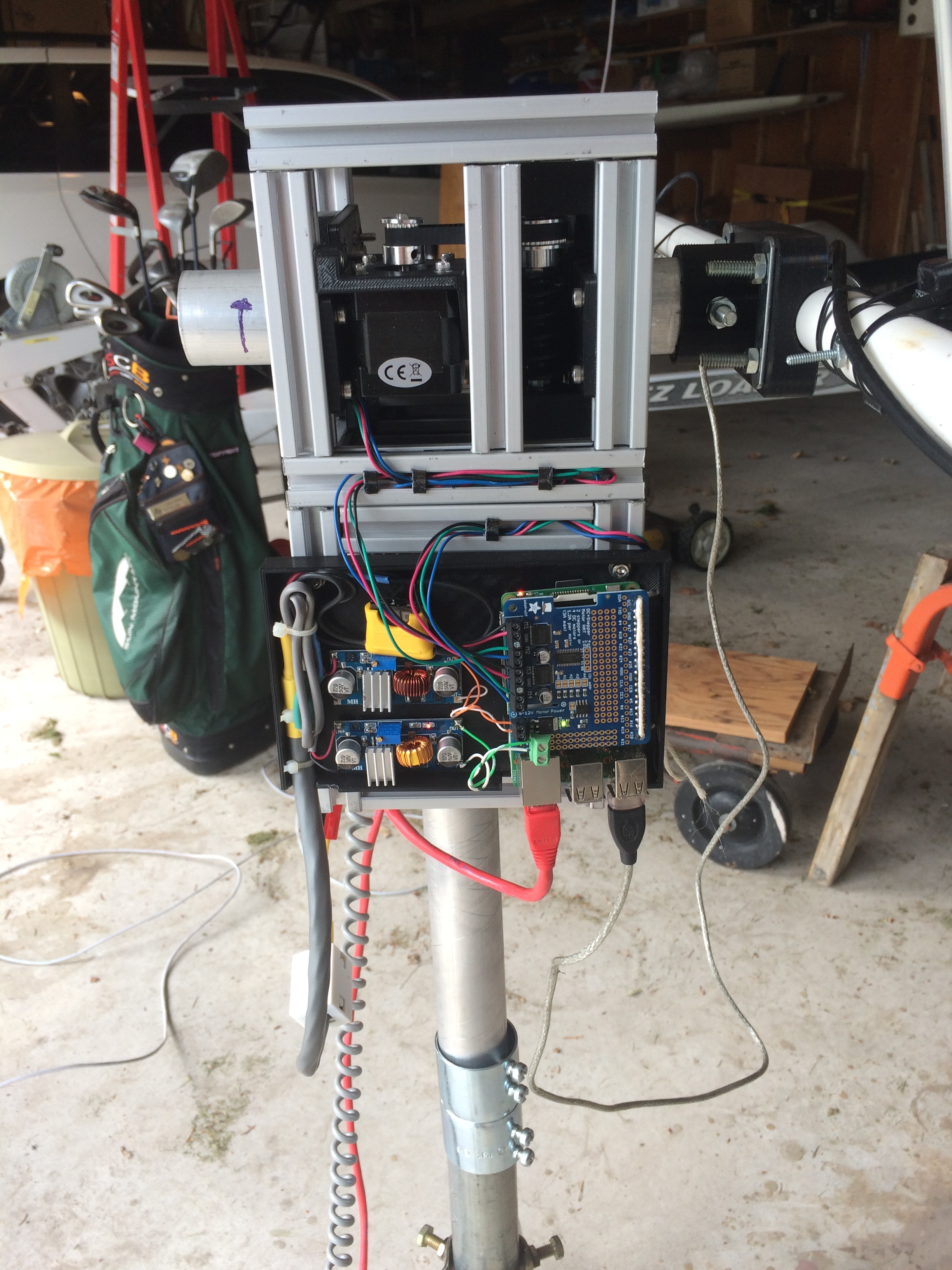
I had trouble with suppliers from China, and then I had a knee replacement surgery, so it took 6 months to complete. Here are two pictures of the completed rotator:
I completely eliminated the Arduino. I connected a motor hat to the Pi c/w matching stepper motors, and wrote a program for the Pi to emulate an Easycomm rotator. The rotator works fine with GPredict - I haven’t tested yet with the Satnogs Pi program.
The antenna is a 3 element yagi tuned for 137.1 MHz; so far mediocre response due to obstructed passes.
I can only see the one, but my eyesight kept me out the cockpit, so not surprising.
Only one way to find out if it affects it or not. I used to use a tripod mounted Arrow II crossed yagi for portable sat work, and would notice some funky stuff when the 2m antenna was twisted to be vertical, and somewhat lined up with the tripod mast. It wasn’t a lot, but noticeable. You may not experience any issues at all.
This is great. It couldn’t be easier.
The control system consists of easily available boards, just plug and play without having to solder much.
Some questions of course …
in the photo I see 2 power supplies, both run to the steppe motor hat, one for the steppe motor power supply, the other for? (green cable to extra connection on motor hat)
you are talking about controlling the rotator via the RPI. Do you also run gpredict on the RPI or do you send the data via lan to the RPI and does gpredict run on an external PC?
Are electrical diagrams available?
You have also written a program for the RPI to work with the easycomm protocol.
Will this become available to the community, or is it possible to get a copy of it?
This seems to be a nice alternative to the existing rotator controls, something that I have an interest in replicating.
Joseph,
The small power supplies are adjustable. One is set to 12Vdc for the stepper motors, the other is set to 5Vdc to power the Raspberry Pi.
The Pi is running headless, so I am using xrdp to control the Pi UI from inside the garage.
On the Pi, I run:
GPredict
Wxtoimg
GQRX
All this shows a CPU load of about 50% on the Pi 3B.
I didn’t make any electrical diagrams. There is a fuse on the 24Vdc input, two DC/DC converters, and the wires to the stepper motors per their datasheets. I didn’t install the endstop limit switches on the rotator shafts.
I’m willing to share the program, but I’m still working some issues. For example, GPredict only updates the desired positions once per second - as a result the motion is somewhat jerky for small changes.
If you decide to replicate this approach, keep in touch on this list and I’ll provide more info.
The parts are ordered, motor hat v2 and 2 stepper motors 12v 1.2a
I still have RPI 3b.
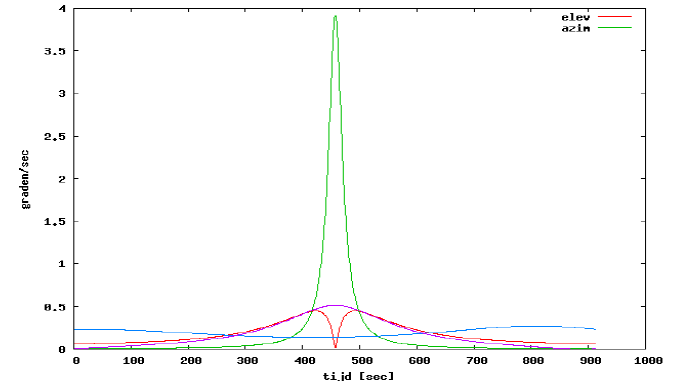
To understand your remark about the jerky motion i found a graph with the angular velocity of the azu rotor with respect to time.
Hereby you see that with a transition of say 82 ° elev the azu motor must run 180 ° in a very short time if the elev is max 90 ° (no flipover).
This means about 4 ° / sec, while in normal circumstances a 0.5 ° / sec is sufficient to follow a sat.
When I think of a fixed motor speed, I think I understand your problem (jerky movement) with small angle adjustments.
Something to test could be to adjust the motor speed to the size of the angle adjustment.
No matter how well you steer, your antenna always comes to the point where the sat was, but as long as the sat falls into the main lobe of the antenna, it doesn’t matter.
So btw if speed is a little bit to slow, you get a very smooth movement. it is now to find out how slow you can go…
THX for all the help already.
I am still waiting for some parts coming from china.
When everything is assembled and testing starts, I will let you know how things are going.
hello eejake52,i like your project,is interesting and i am thinking of building it so i have some question if you don’t mind:
-the rotator works only with that Adafruit HAT?!is it possible to replace with a simple dc motor driver or a simple stepper motor driver like Pololu 36v4?!
-is it possible to add a position feedback to the stepper motor so that in case the wind or the weight of the antenna shakes the rotor and the motor moves few degrees off the programmed position?!
i am interested in your system because i have a sarcnet rotator but when i transmit with some power or on some ghz frequency it interfer with the digital compass and is then bad with the system(moves in all the places when i push ptt) so i am looking in a system like yours that is not using any gps,digital compass,field efect sensors that can interfer with my signals in any way.
thanks in advance and best wishes
Cristian,
I used the Adafruit driver that works with that HAT. I don’t think it would be worth the hassle to try and use a different interface.
I haven’t investigated any position feedback, partly because I have to setup/takedown every time I use the rotator, so I need to align it to North on each use. I may look into that in the spring when I get back to the project.
Hope that helps,
Jake
I know this thread is old. I’m having issues where i’m recieving the easycomm II and the code is stripping it and passing it through but i’m not getting any motor movement, using cli i can move the motors manually.