Hello @bali
I am currently working on building a telemetry decoder for the UWE-3 satellite. As part of this effort, I have been reverse engineering the telemetry frames using data available from the satnogs database.
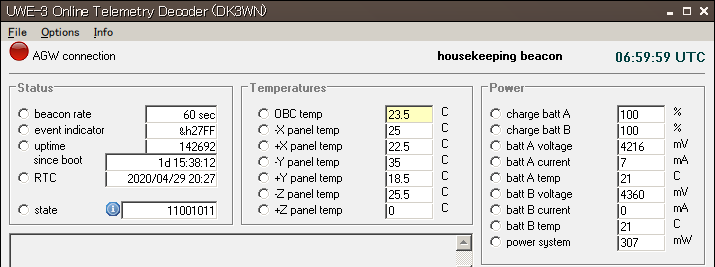
So far, I have retrieved telemetry data from the satnogs DB, filtered and reconstructed valid frame fragments, Identified frame structure and signature and successfully decoded several fields such as battery voltage, bus voltage, and system counters
While the decoding pipeline is working, I would like to validate my assumptions and ensure correctness before proceeding further.
I wanted to check if you could share the official UWE-3 telemetry protocol specification (frame format, field definitions, scaling, etc.) or point me to any available documentation.
This would greatly help in verifying field mappings, correctly interpreting sensor data and completing a reliable open decoder for the community
Thanks in advance for your support.
Best regards,
Sunil