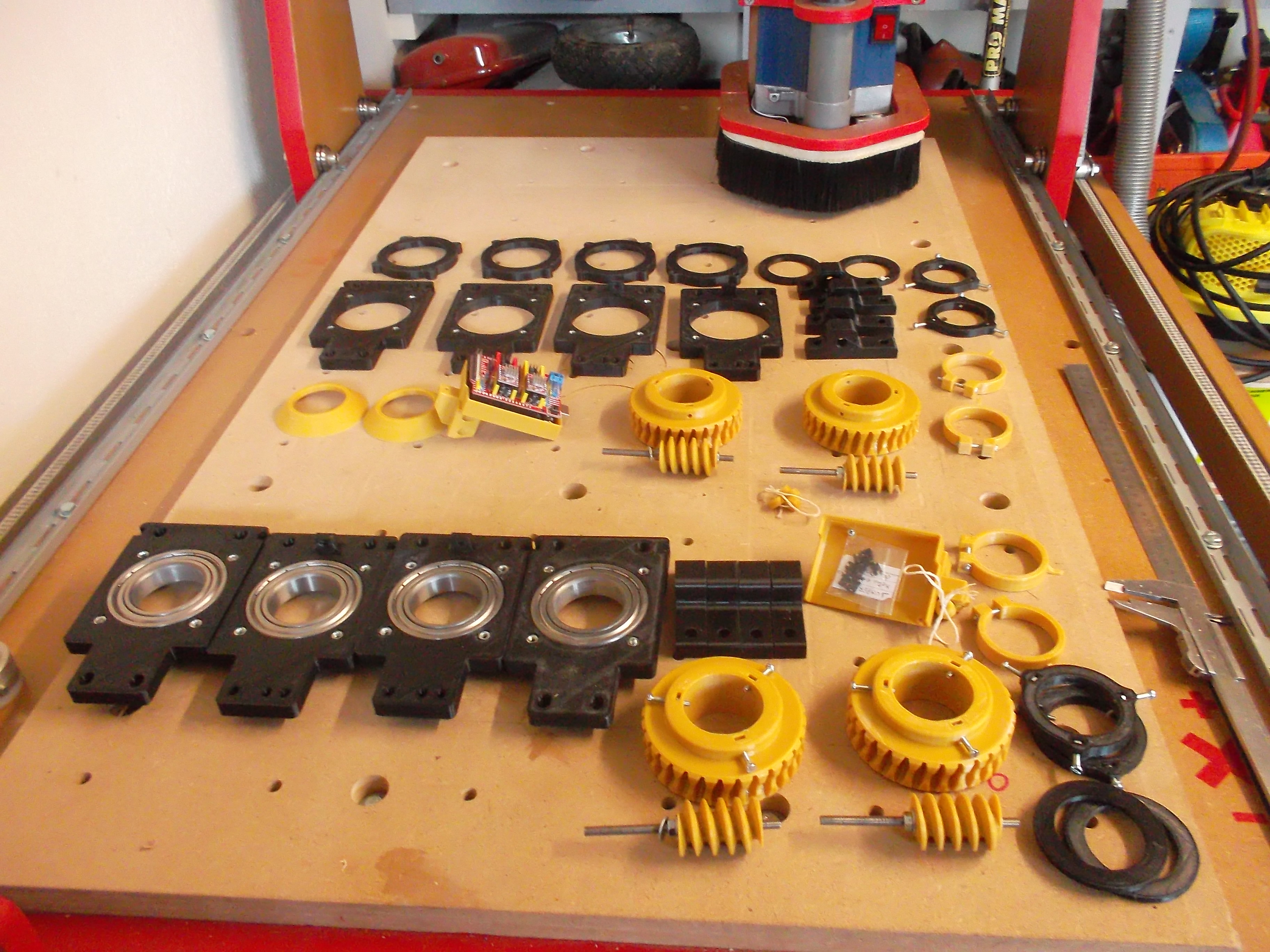
Hello, a little news of the progress of the rotator, I finished the mechanical parts for two rotators, one for me and one for friend he does not have the printer 3 d, I wait for the profiles of at motedis with impatience to finish the project, see you soon.
Rémy.
6 Likes