Hi.
Finally I have only to connect pcb on DC motors rotator.
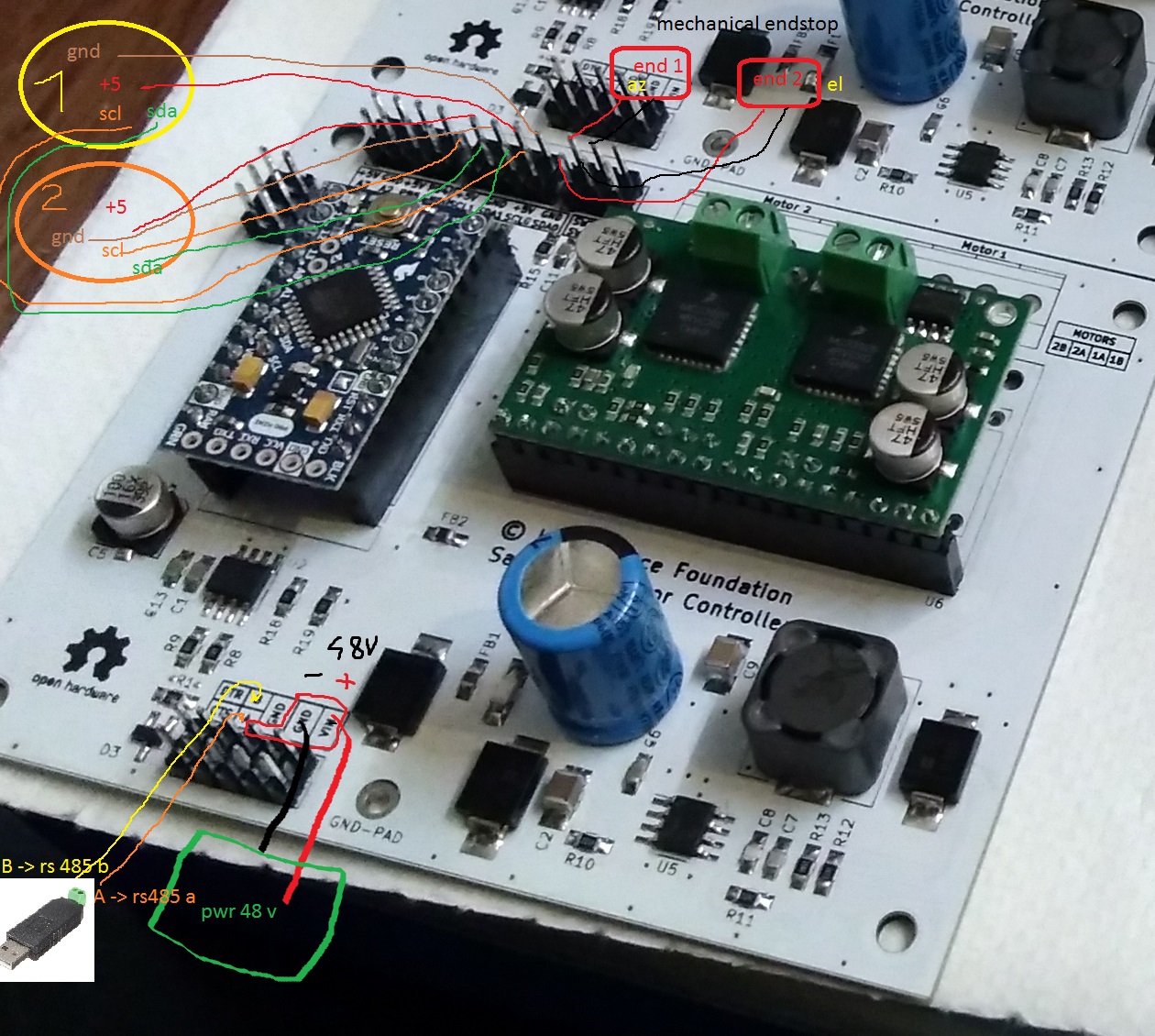
Is this the correct wiring or something is wrong ?
1 is for AZ 2 is for EL
Sorry for bad design
Thank you in advance for help me
Massimiliano - IZ5RZR
Hi.
Finally I have only to connect pcb on DC motors rotator.
Is this the correct wiring or something is wrong ?
1 is for AZ 2 is for EL
Sorry for bad design
Thank you in advance for help me
Massimiliano - IZ5RZR
Hey! You are correct!
The wiki page wasn’t it helpful?
We can make a diagram like reprap-ramps or like yours to populate the wiki page.
HI Agis
I connected all the cables according to the instructions and the photo shown here, I connected the rs485 to the usb both of the pc and the raspberry and everything seems ok, it communicates regularly.
I have this problem that I can not solve
The rotor starts and reaches position 0 AZ, but in elevation it does not move.
The DC motors work regularly, the endstop of the elevation if the bypass moves the elevation until I interrupt the connection (enstop home) then arduino understands when he has to stop the motor in EL because it has reached 0 EL.
I have checked and double-checked the connections of the SCL encoder SDA GND and 5V and everything would seem OK.
However, both with HRRD deluxe and GPREDICT with raspberry, the rotor follows AZIMUTH regularly but in elevation it does not move anything.
What can you depend on? Encoder not working?
I thank you in advance for the help
IZ5RZR Massimiliano
Hey! Disconnect the gear of encoder and rotate the encoder, then read the value of encoder,
by sending to the rotator, w IP4 (use rotctl). With this test you can check the encoder. The elevation motor is it working properly ( is it hit the end-stop in homing function)?
Hello
I did a bit of testing.
If I remove the encoder from the gear and rotate it by hand, the motor moves and, depending on how much I move the encoder shaft, the rotor moves in one direction or the other, if I move quickly to accelerate.
So I think that then the elevator encoder is ok.
Is there any doubt that the motor dc turns in the wrong direction and therefore the encoder assumes shaky values?
If active Gpredict the azimuth is fine and reads the values, while the elevation does not read the values, but if I move the encoder then it starts reading values but it seems that they are in reverse. Maybe that’s why?
I also tried to reverse the DC engine cables but it seems to me that nothing changes
The rotary encoder measures negative values. Which firmware the board runs? Is it after this commit?
Hi
Agis, I don’t know. Last month you have send me a Board V 2.1 with included Arduino pro so I think is the last version.
Infact i can see when i move manually encoder that Gpredict read negative value.
Maybe I must reflash arduino firmware with new version?.
Anywere may I change via firmware the direction of DC motors?
next time i will make a little video to explane what happen to try to fix rotator.
The engineering of new rotator is very great, a litte bit complicated but very great.
Massimiliano
Hey!
I think it is better to update the firmware. For sure the board has the firmware before this commit.
You don’t have problem with direction, because when the set point changed the PID controller never zeroing the position error due to wrong direction of DC motor.
I have opened an issue about it.
Ok, I will try to reprogram with new firmware.
I hope ti fix it
Many Many thanks
{kind=link}