Regarding Observation 13696626 …
Can someone please tell the how Satnog’s team get the TLE of any satellite, specifically this one 1 98345C 26066AB 26089.50170542 -.00003004 00000+0 -14893-3 0 07
2 98345 97.4431 49.1553 0000362 126.4920 237.1910 15.17819254 18
Doppler measurements, here an example on the T16 launch.
Jan | PE0SAT
1 Like
I guess the Unknown 2 Satellite to be one of the following NORAD IDs given on SpaceTrack.org. Could anyone confirm if my guess is indeed valid?
- 68443
- 68445
- 68467
- 68455
i recommend you to learn using ikhnos, this tool used for verifying tle or multiple tle of one satnogs observation
and for multiple obs ichnos
i save 4 tle above + default tle from obs in this file
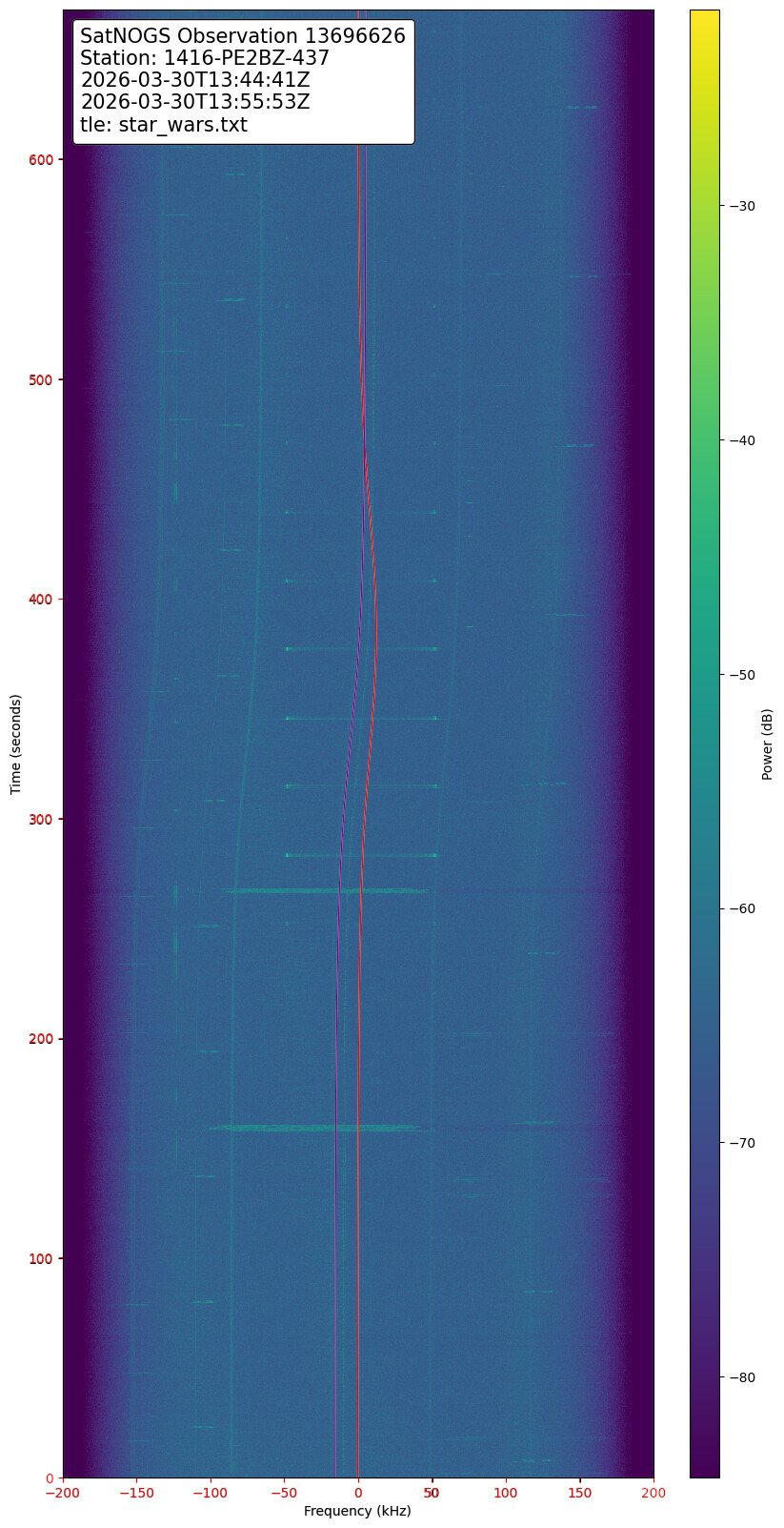
star_wars.txt (757 Bytes)
and run ikhnos command:
./ikhnos.py -r 300 -f 0 -t star_wars.txt -e 1000 13696626
result:
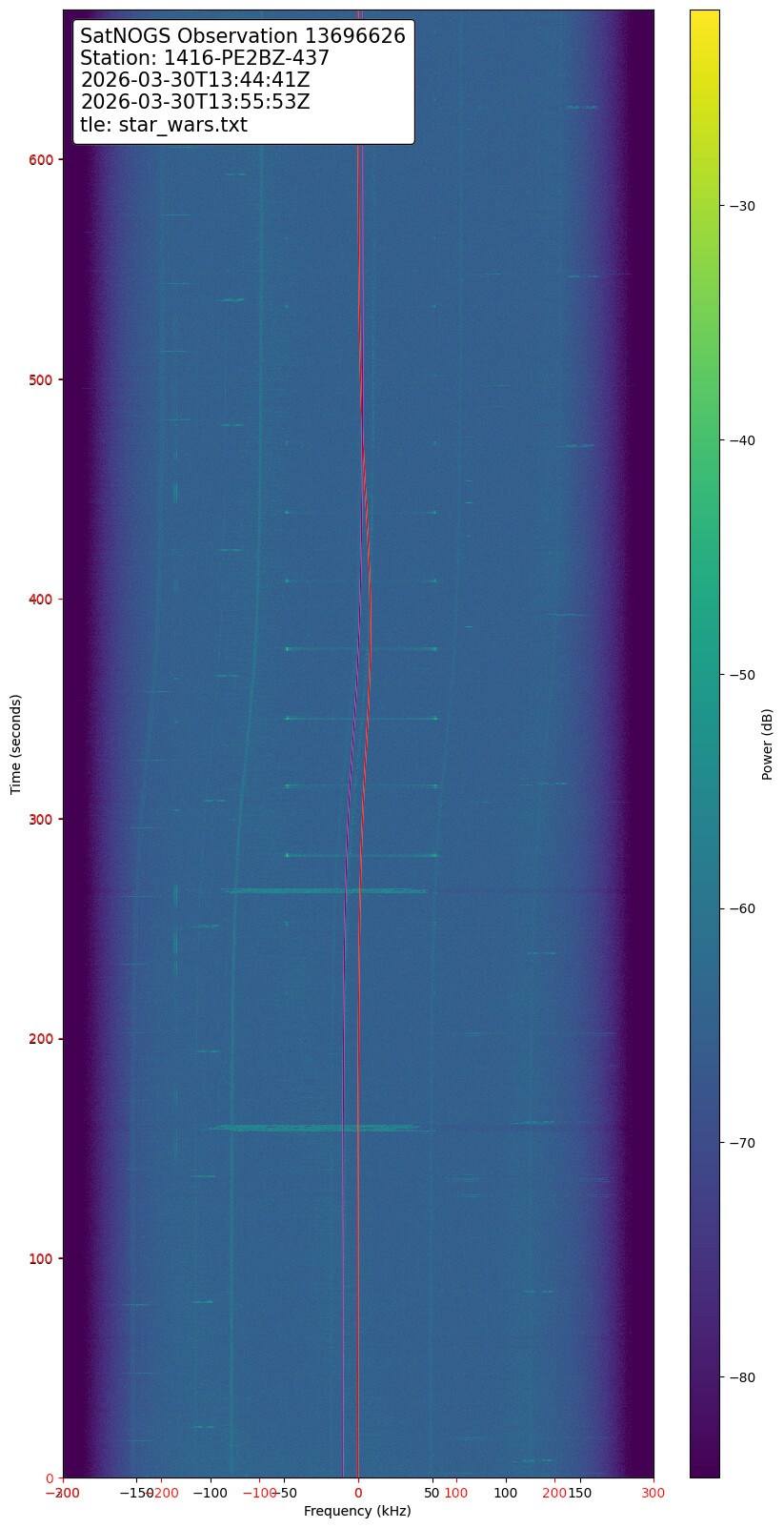
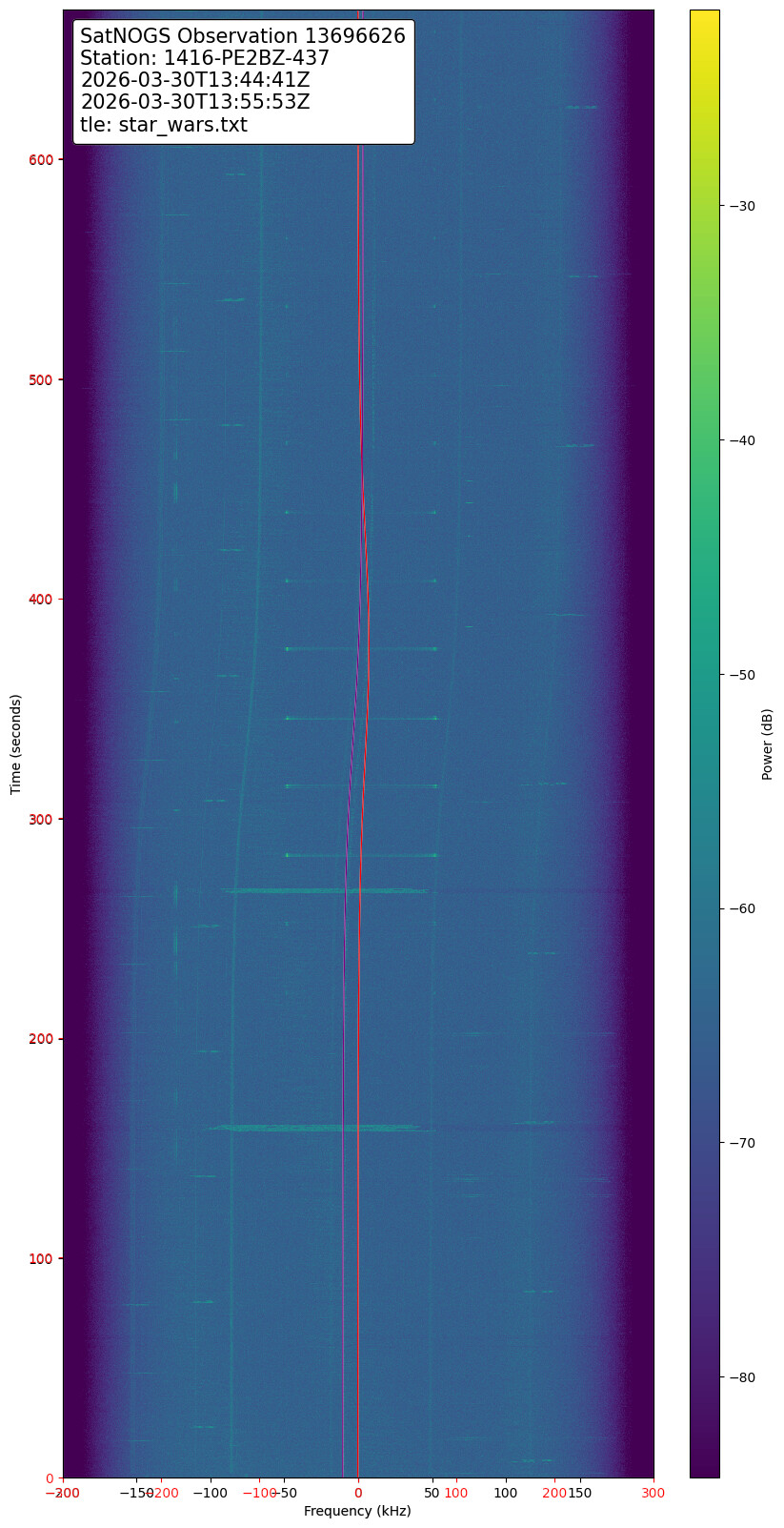
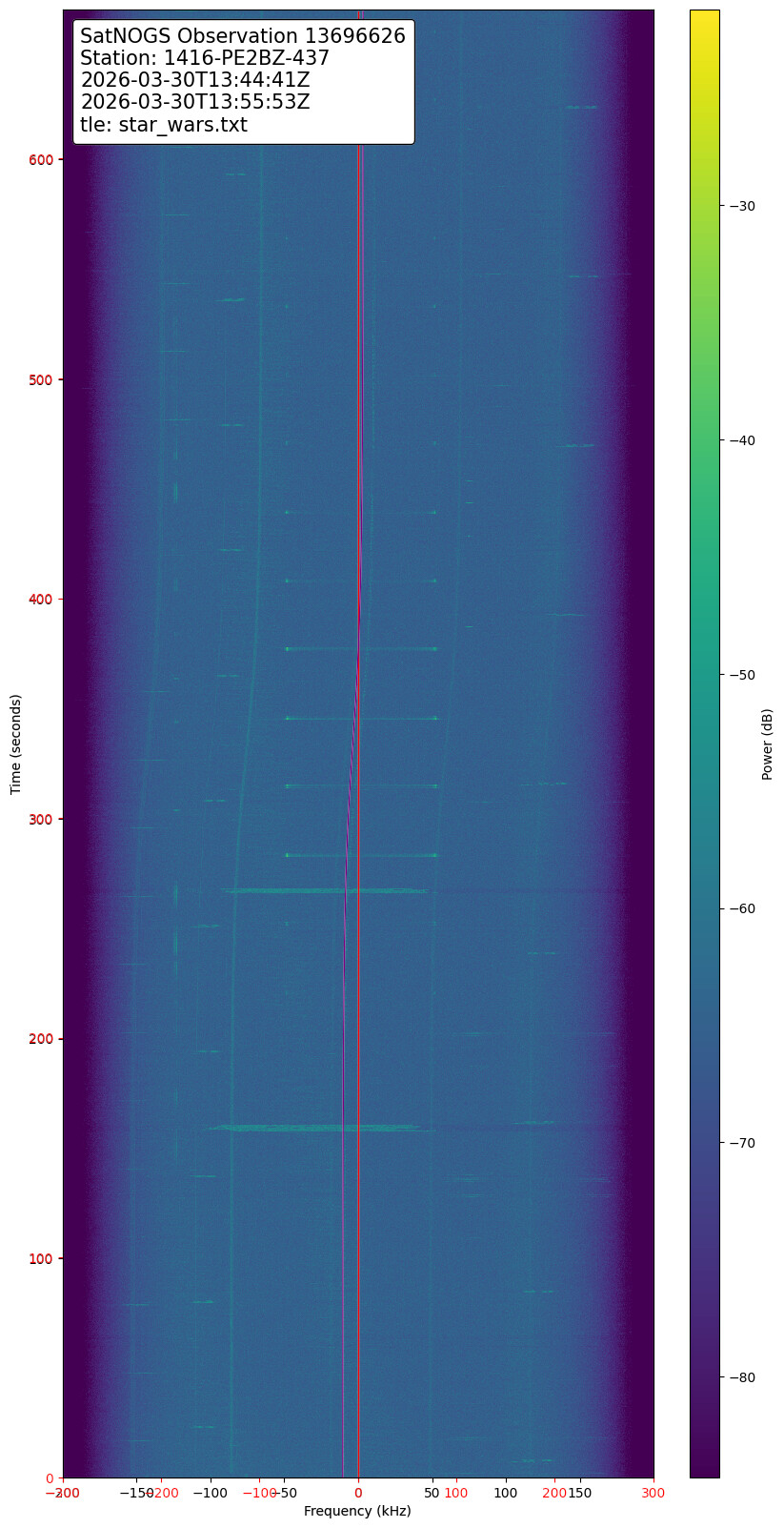
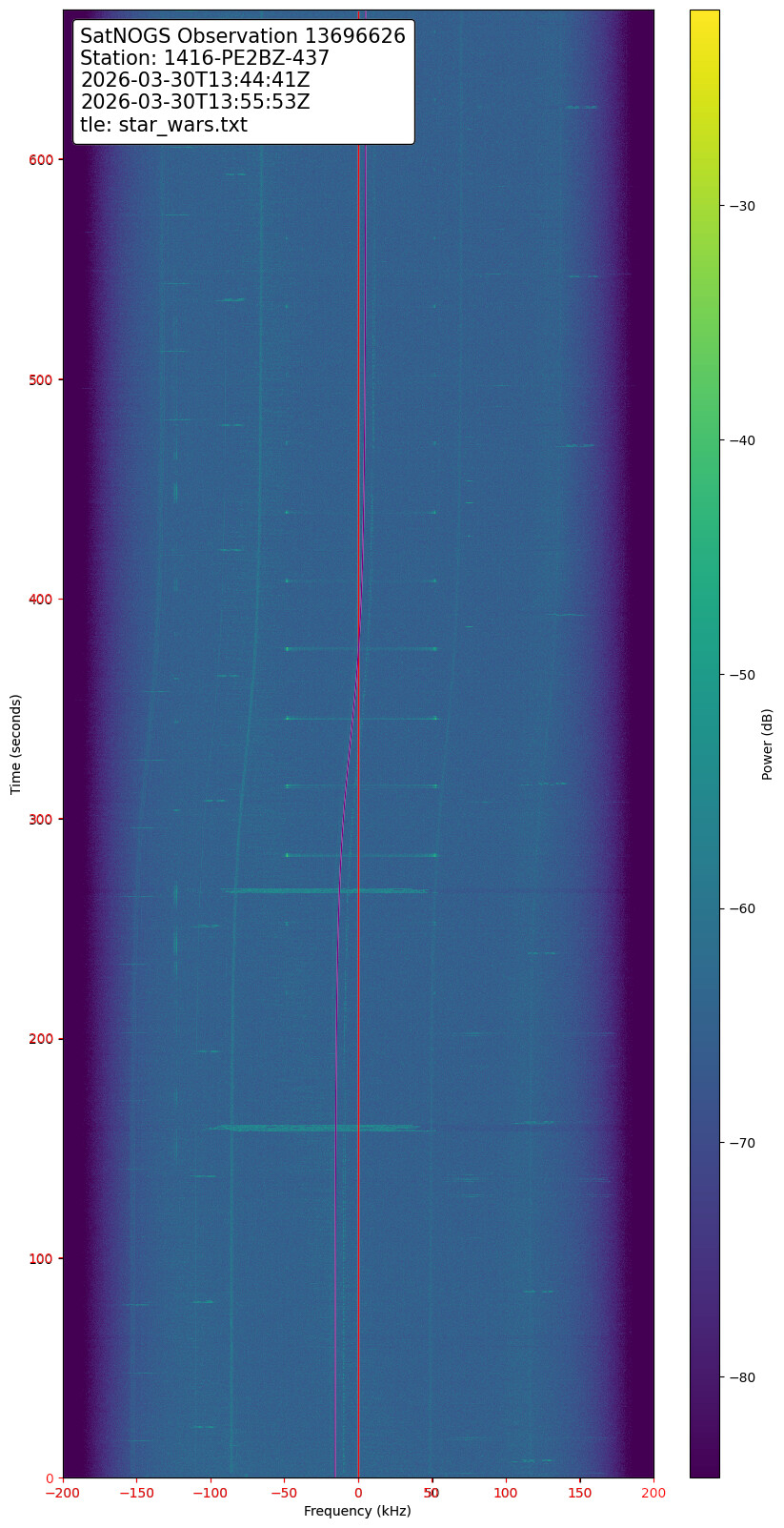
default tle from satno still the best. follow the straight red line
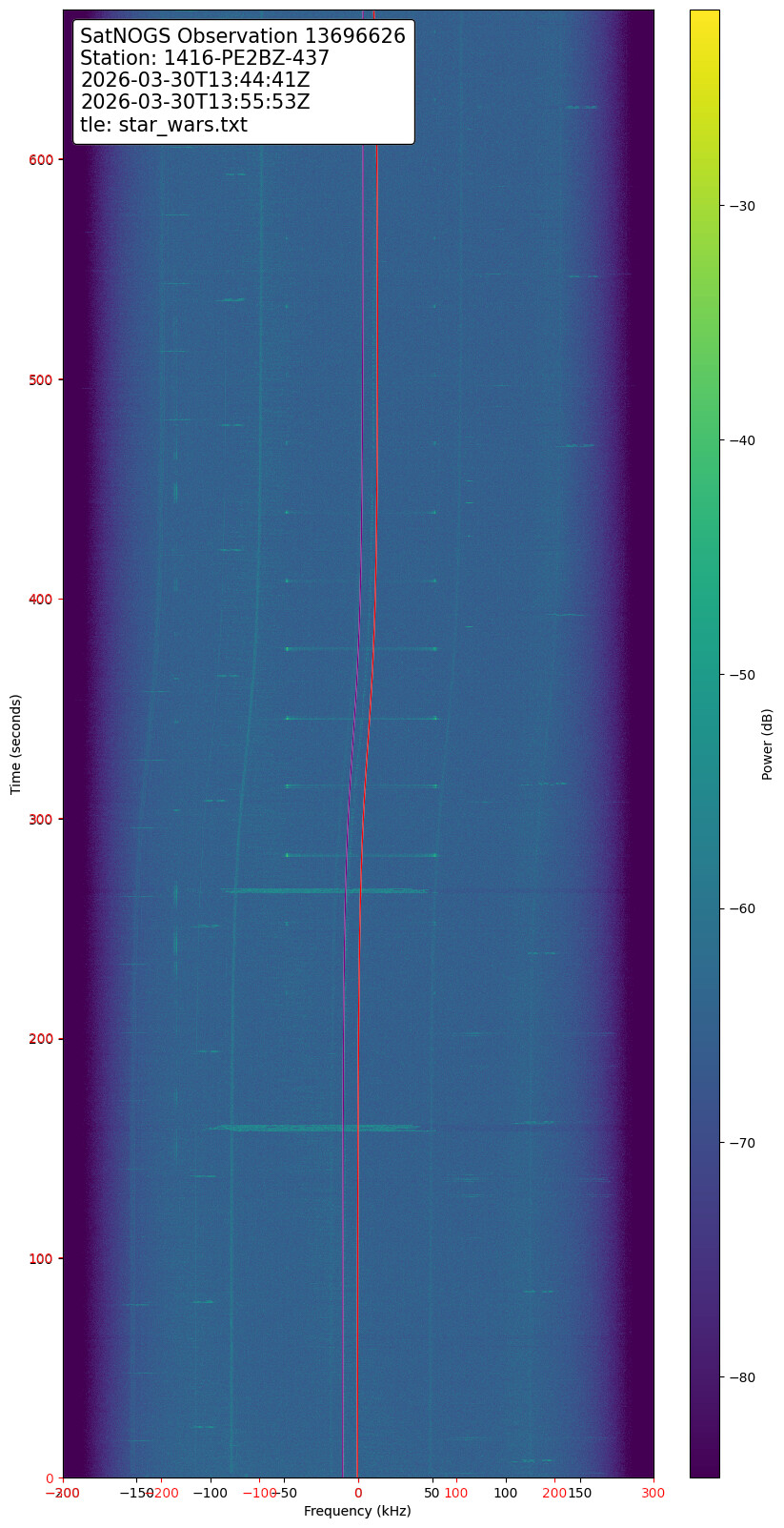
@bali unfortunately the horizontal values don’t fit the waterfall’s scale. The value should be something like 200, if you get an error, you may need edit the options in the script .py file.
you’re right. thank you!
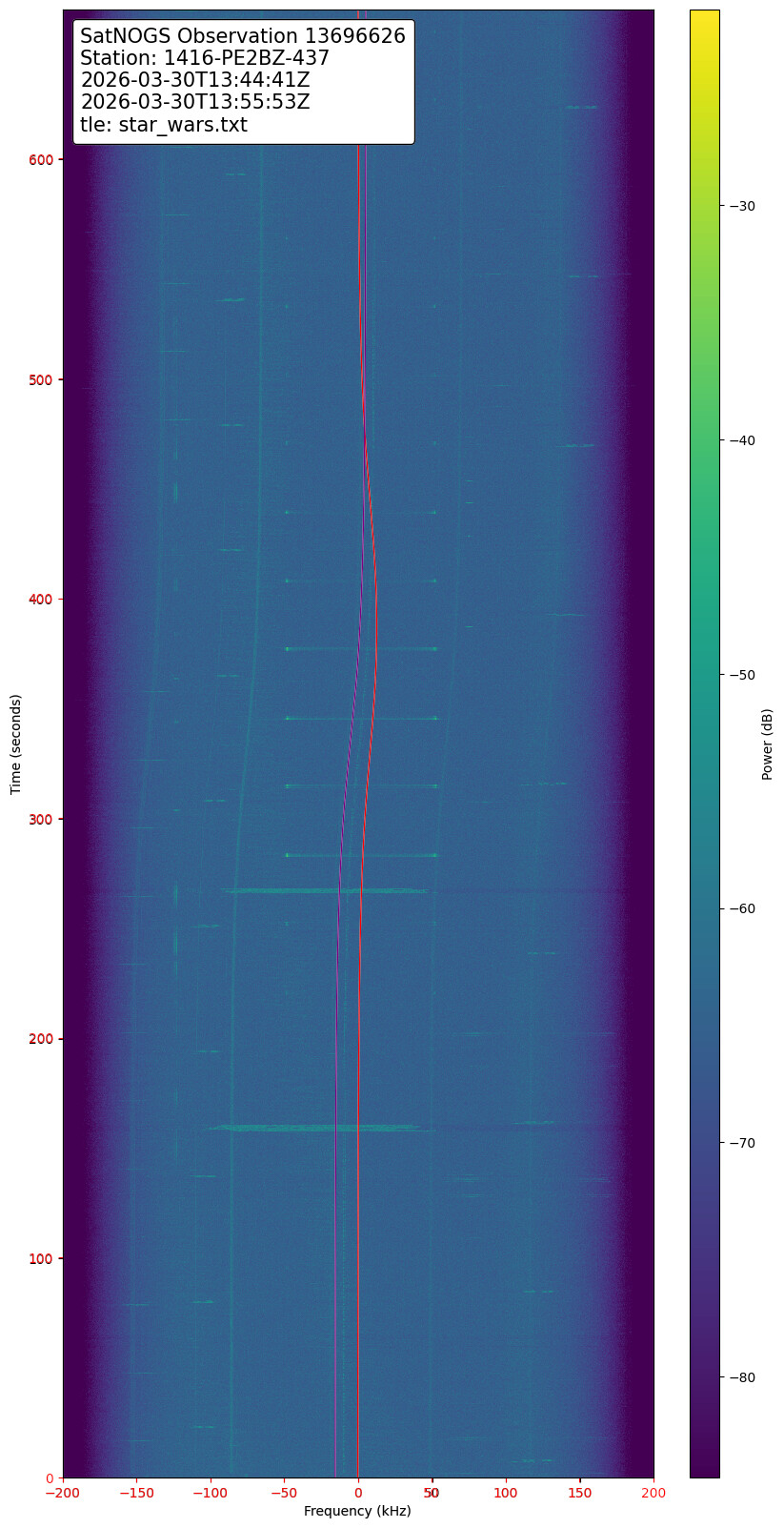
update ikhnos.py at line 54, add 200
FREQ_RANGES = [24.0, 25, 29.0, 30.4, 33.2, 38.5, 50, 69.0, 77.0, 83.8, 100, 115.2, 160,174, 200, 230.4, 300]
ikhnos.py.txt (15.3 KB)
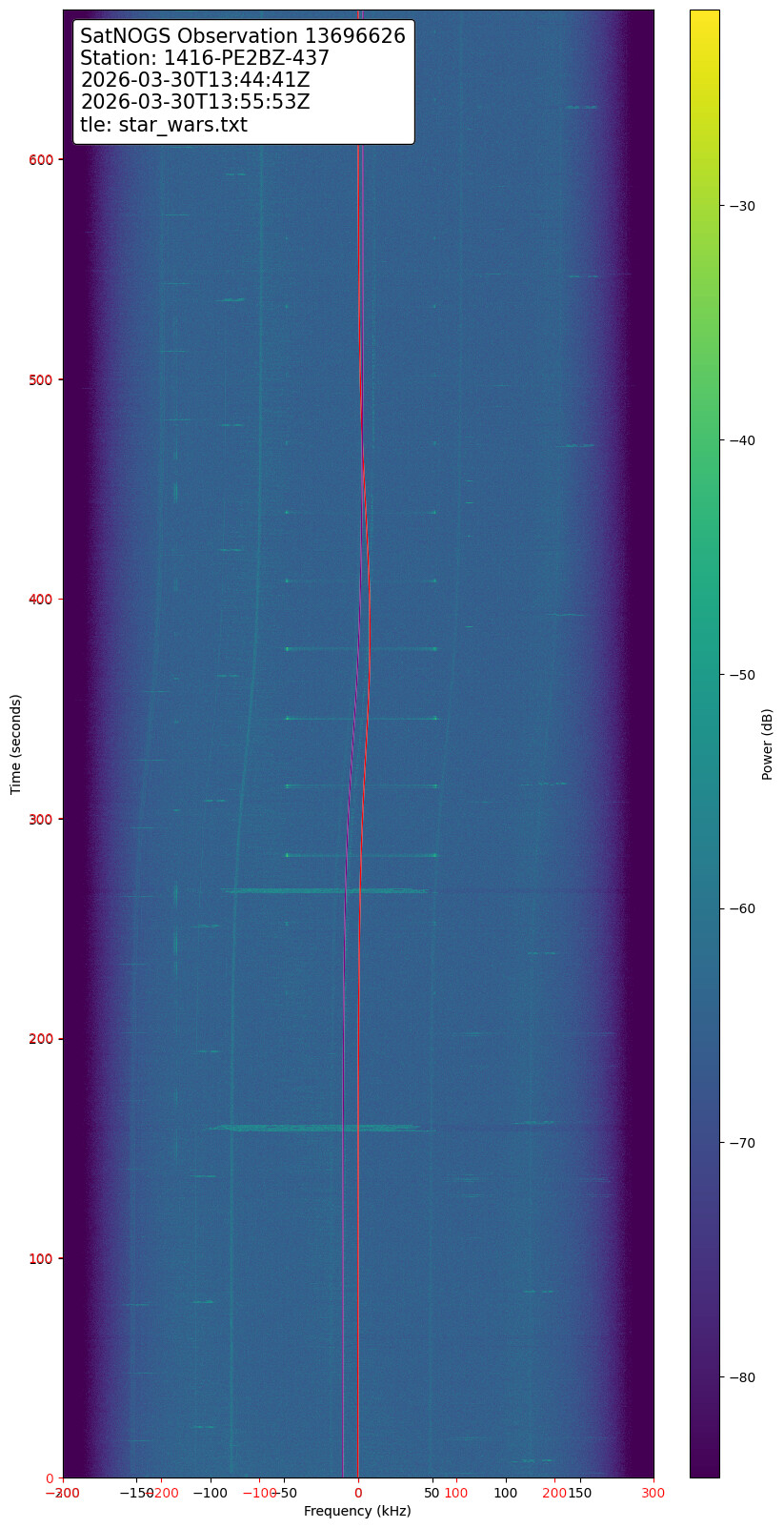
result:

btw i check the observations date is along ago:
![]()
of course the latest tle will not accurate..
Thank you so much for the clarification. Since I am quite new to this, please excuse any obvious questions!
To make sure I understand the process: in order to identify which TLE is the most accurate, should I be focusing on the red line to see if it is centered or how much it is offset, rather than looking at the purple line?
Additionally, as you mentioned that the latest TLE might not be the most accurate, so I compared some selected analyst TLEs against observation ‘13705604’ (April 1st) and I am finding that almost all of my resulting plots look identical. Why would there be no visible difference between them?
yes . red line is sat signal. purple is noise / terrestrial signal.
for fair comparation, you should compare using tle around april 1st too.
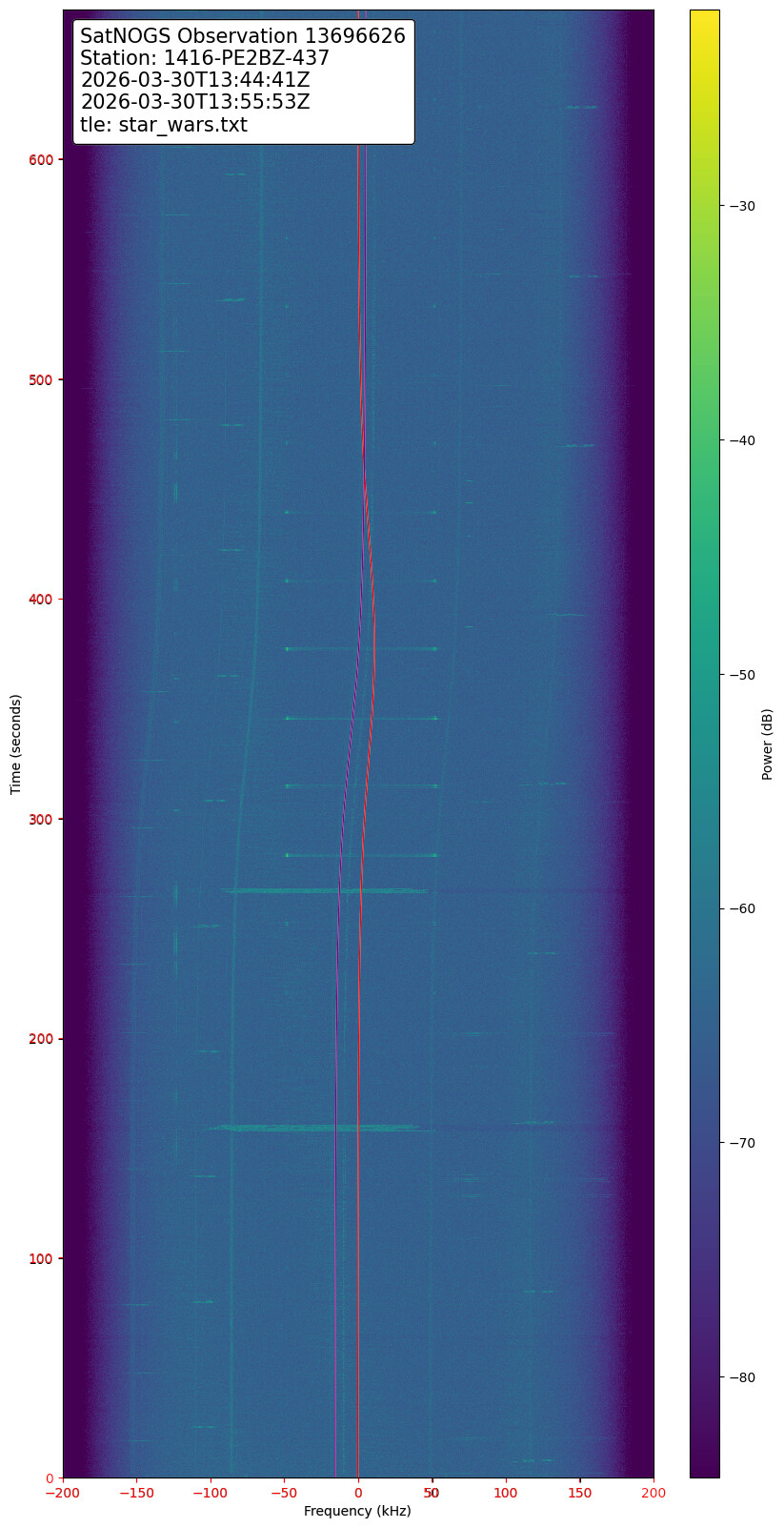
Just to explain this a little better, for each TLE you test with ikhnos you generate an image that contains the waterfall of the observation overlayed with a red and purple line, the red one is where we expect the signal of the satellite be on waterfall if the satellite follows the object that TLE describe and the purple one is what signal follows if it comes from a terrestrial source.
About which TLE you should use, you should select the ones with epoch closest to the start/end time of the observation. More than 2-3 days difference, it may not give you good results.
2 Likes
Thank you for the clarification.
As advised, I tried plotting several analyst TLEs from April 1st for objects 88072, 88073, 88074, 88075, 88076, 88077, 88083, 88084 and 88085 as I don’t have for earlier dates. I used Observation 13705604 (Unknown2 - T16) with the ikhnos.py code provided by @bali. Since the resulting plots look very similar, I am having trouble deciding which one actually matches the unknown object. In all cases, the red lines seem to pass directly through the center of the signal. Could you please advise on how I might move forward to finalize the TLE?
Good question.
I would be careful not to finalize the object from one observation only if several candidate TLEs produce visually similar overlays.
At that point the overlay is probably telling you that the candidates are still within the uncertainty of that specific pass, not that they are all equally confirmed.
I would move from visual comparison to a small residual comparison across multiple observations, preferably separated in time and using TLEs close to each observation epoch.
Something like:
- observation id and observation time
- candidate object / TLE epoch
- frequency used
- measured signal points
- predicted track residual in kHz, mean and RMS if possible
- whether the residual keeps the same sign or changes
- notes about possible terrestrial or unrelated traces
Then I would select the candidate that stays consistently closest across several observations, not the one that looks best on a single waterfall.
If the residuals remain indistinguishable, I would report the identification as ambiguous rather than forcing a final object match too early.
For closely deployed rideshare objects, this kind of ambiguity is expected unless you have enough time-separated observations or an independent identification source.
F.