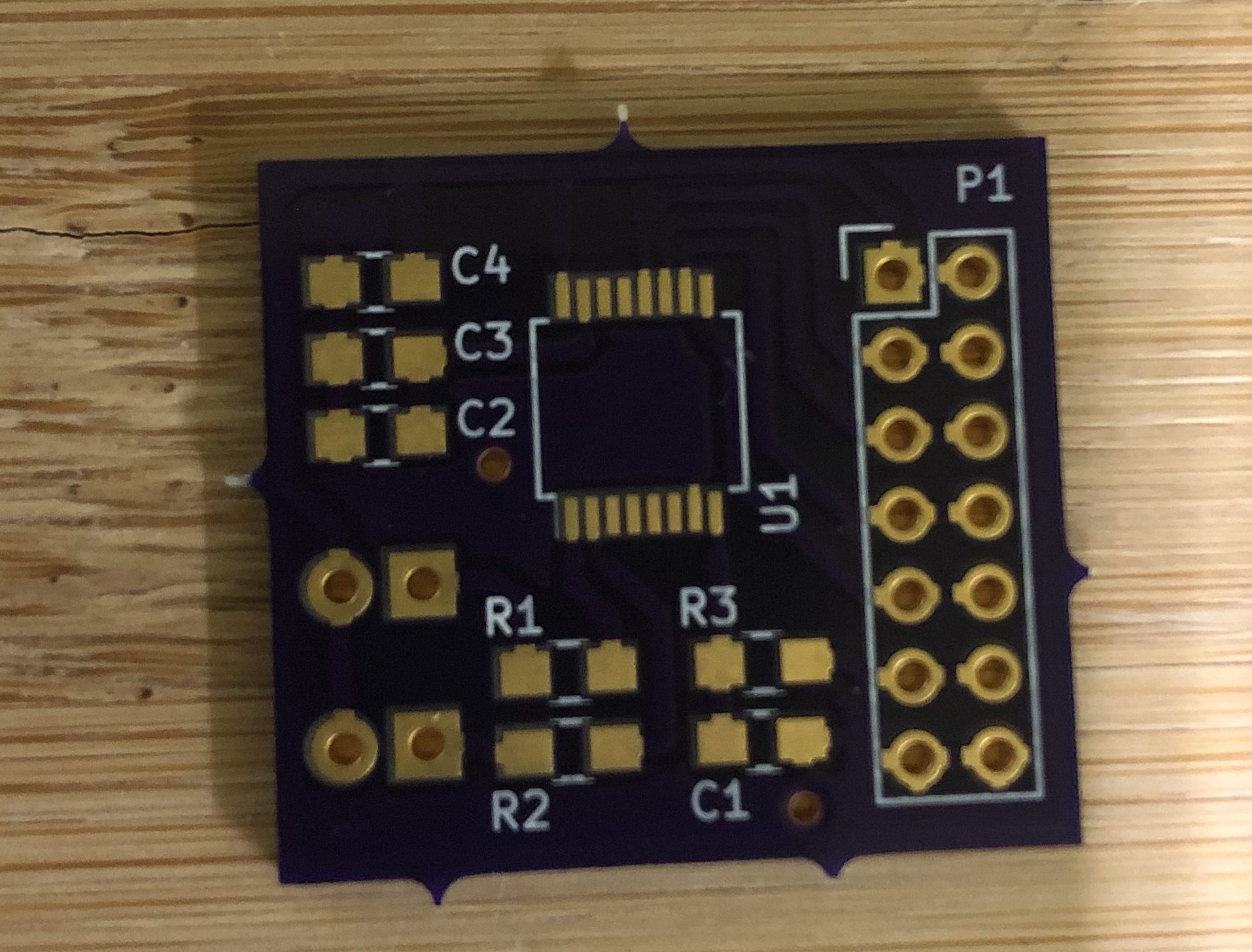
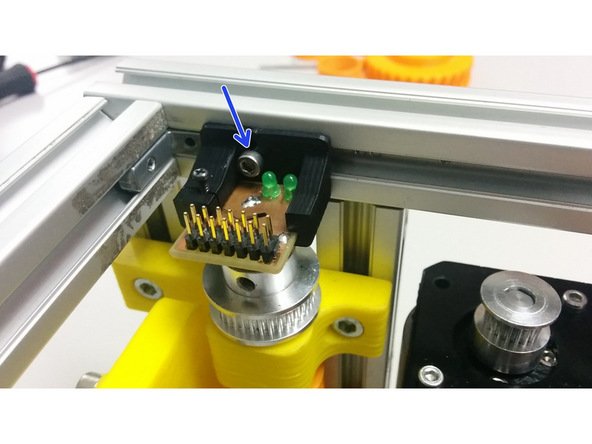
Thanks for the replies. I guess my question is that in the image below from the build sequence (https://ohai.satnogs.org/project/satnogs-rotator-v3-mechanical-assembly/hardware/) shows the new version of the DC motor encoder. The image from my first post shows a new encoder board based on the AS5040 chip. The image below shows the prototype board mounted above the DC motor drive axis. I have the board and the associated 5040 chip. The problem is that I don’t have a schematic to figure out the component values, nor do I have an stl file for the bracket to hold the board as shown below.
I am wondering if I should abandon this route, get the old 5601 encoder and the old encoder board and go that way, versus using the items I now have.
I am guessing that it will not be straight forward as to how I can connect the new encoder board to the existing Satnogs Controller?