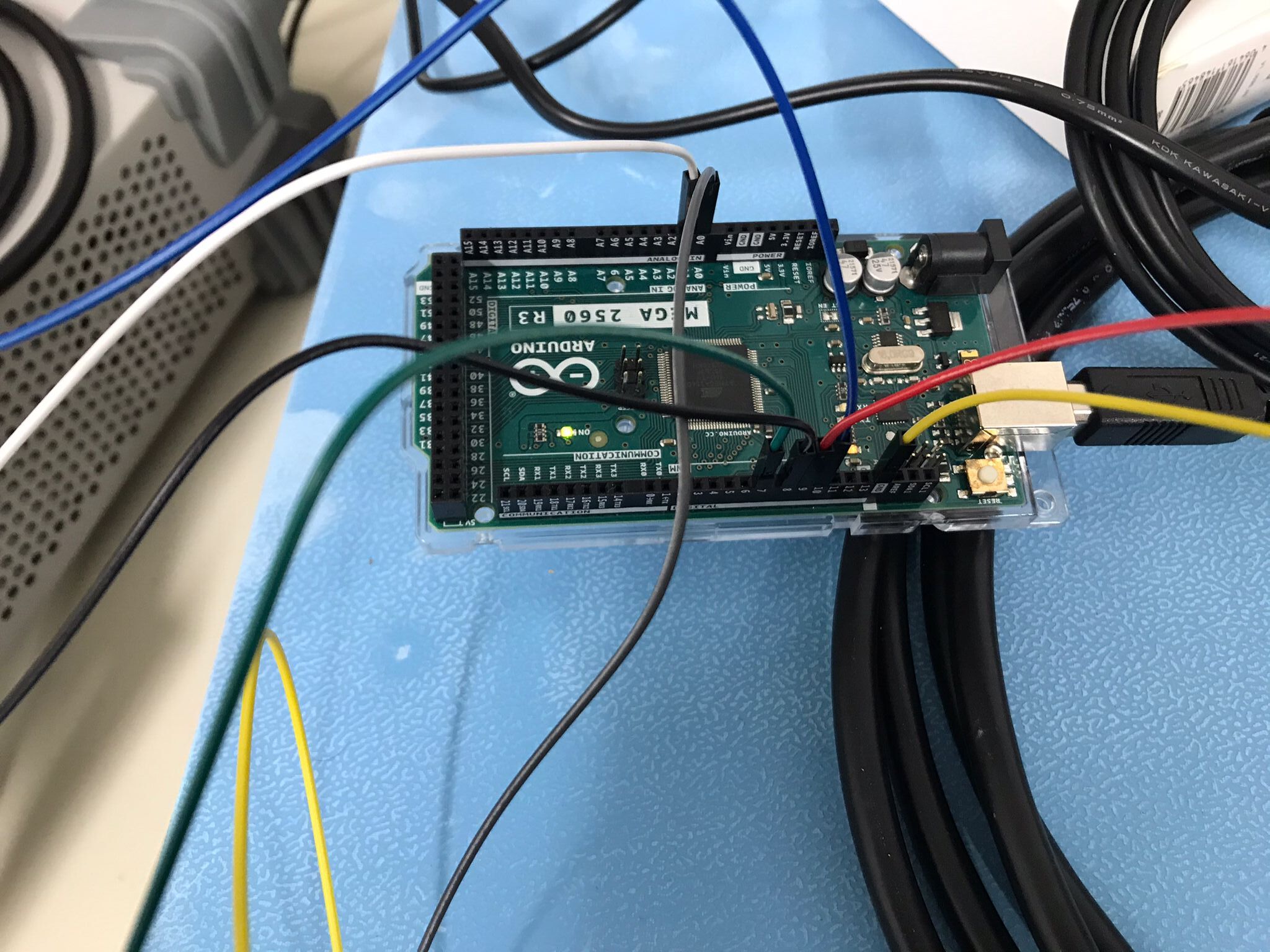
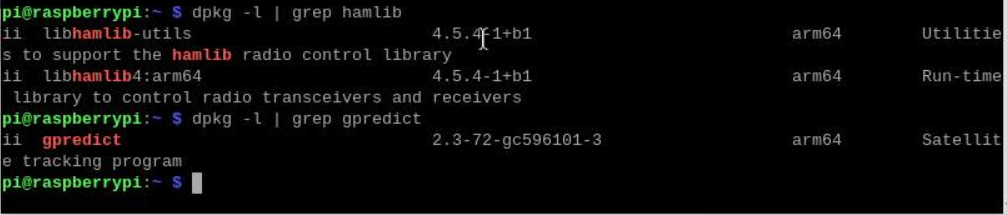
I am working on a project, and I decided to use a Raspberry Pi 4B with gpredict and Hamlib’s rotctld, an Arduino Mega, K3NG rotator controller code, and a Yaesu G5500DC to control an antenna.
I successfully uploaded the K3NG code into the Arduino and set up a breadboard configuration. The azimuth functions correctly and moves as intended, but the elevation does not move.
When I press the up and down buttons on the elevation control box, they function properly. The issue lies with the interface. I tested if there were current and the cable for the elevation is fine.
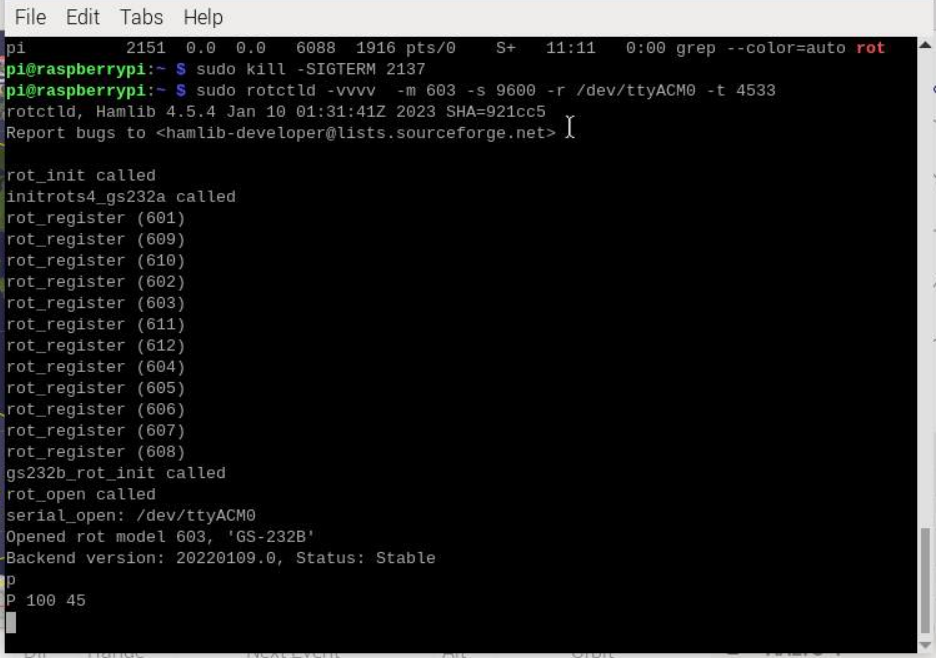
I used the following command in the terminal: “sudo rotctld -vvvvvvv -m 603 -s 9600 -r /dev/ttyACM0 -t 4533 &” to establish communication with the Arduino.
Afterward, I captured some screenshots of the Raspberry Pi terminal and discovered that the elevation data from the Yaesu does not get a response:
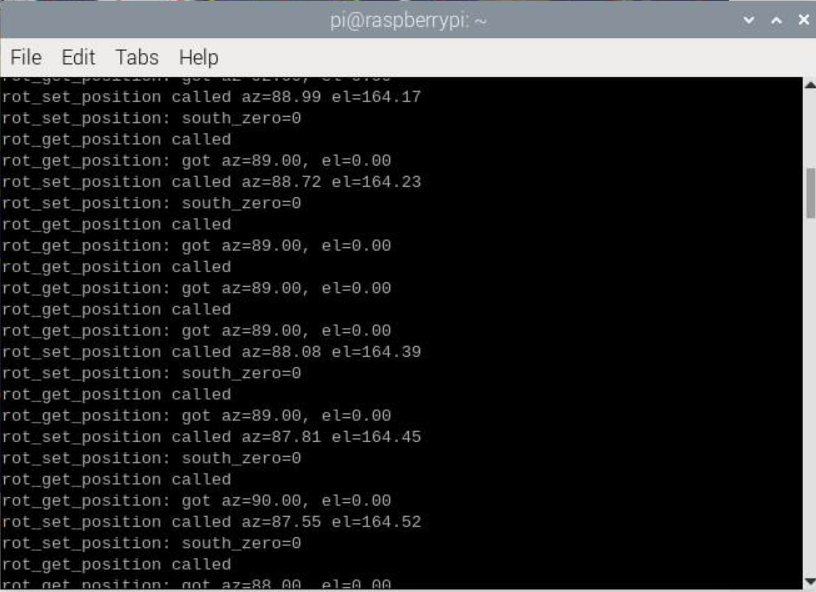
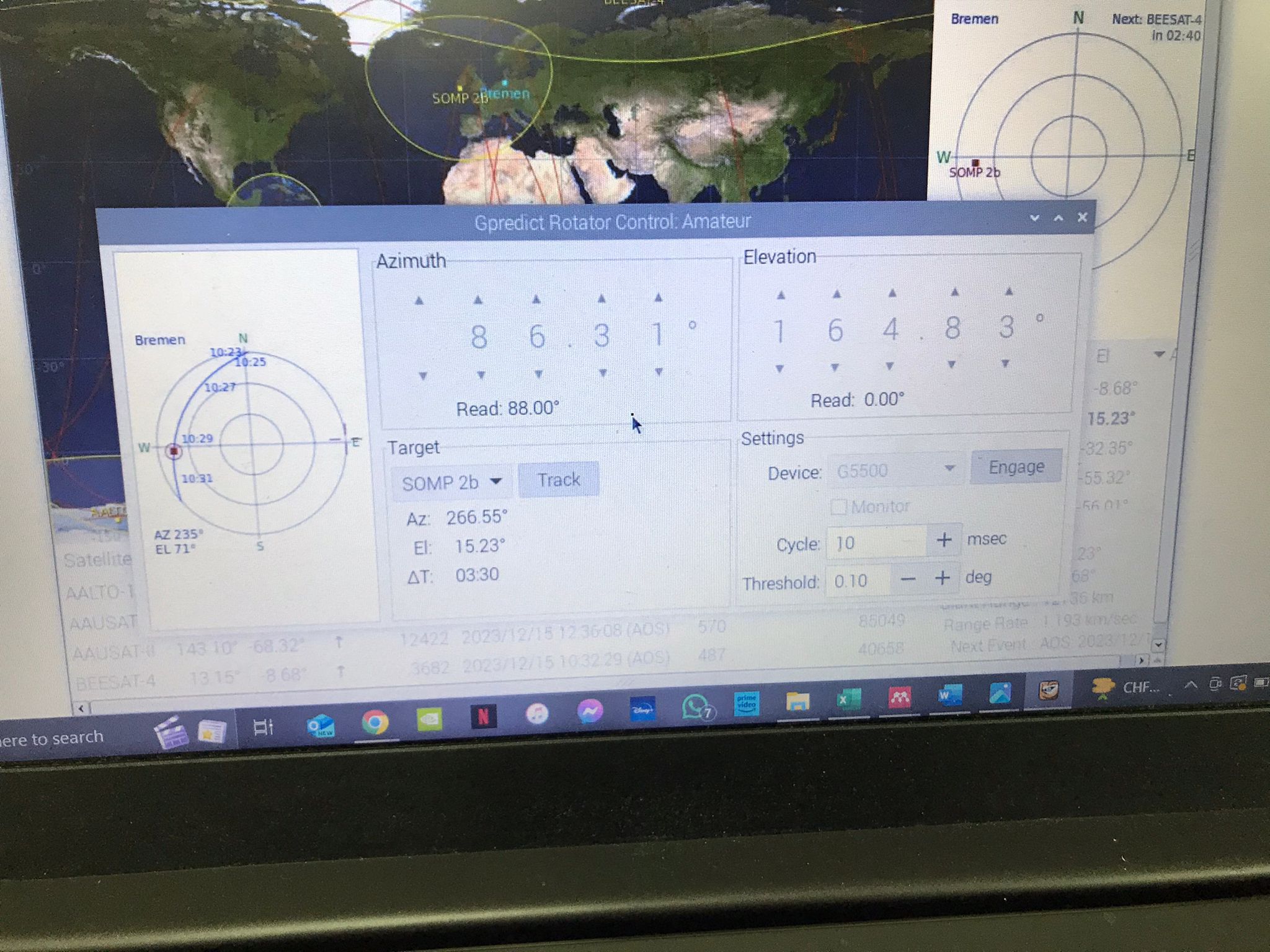
Here, gpredict reads only azimuth but not the elevation:
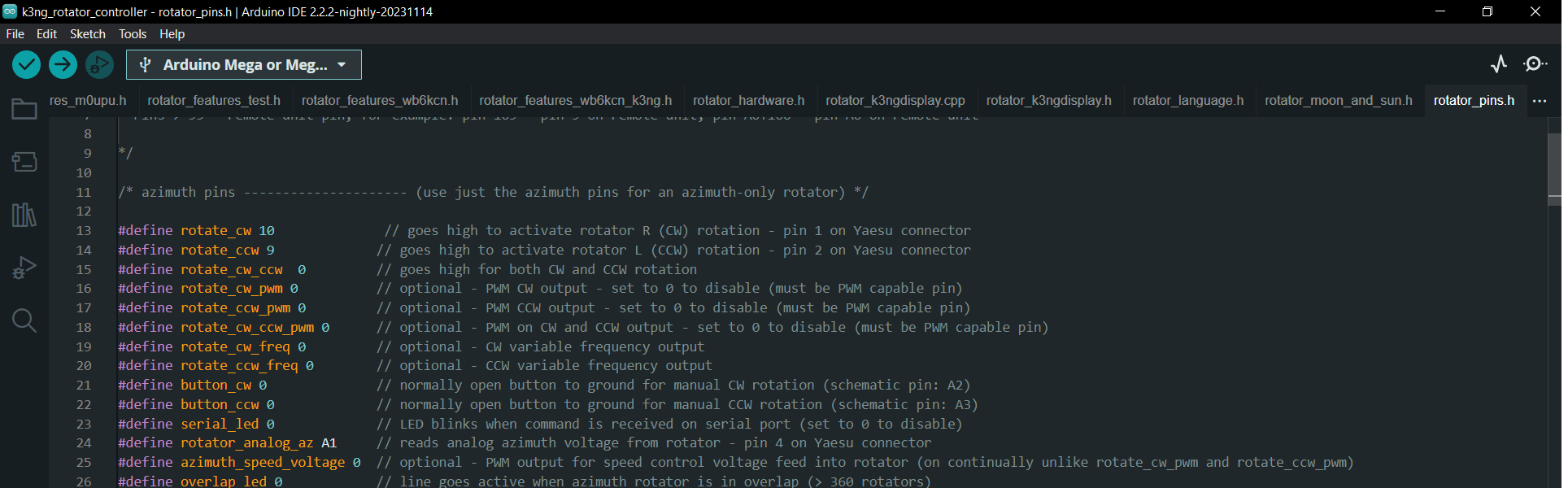
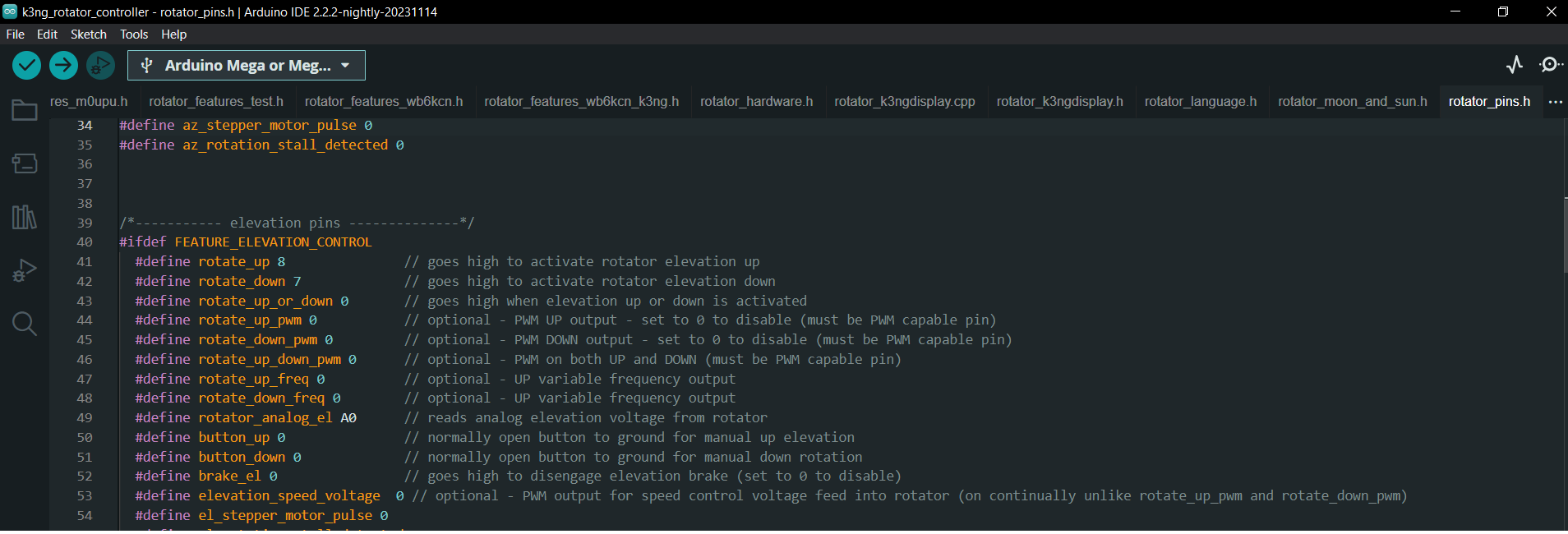
I don’t know if it has anything to do with the K3NG code? Should I modify something else? I am using from the rotator_features.h file (untouched):
-
FEATURE_YAESU_EMULATION
-
OPTION_GS_232B_EMULATION
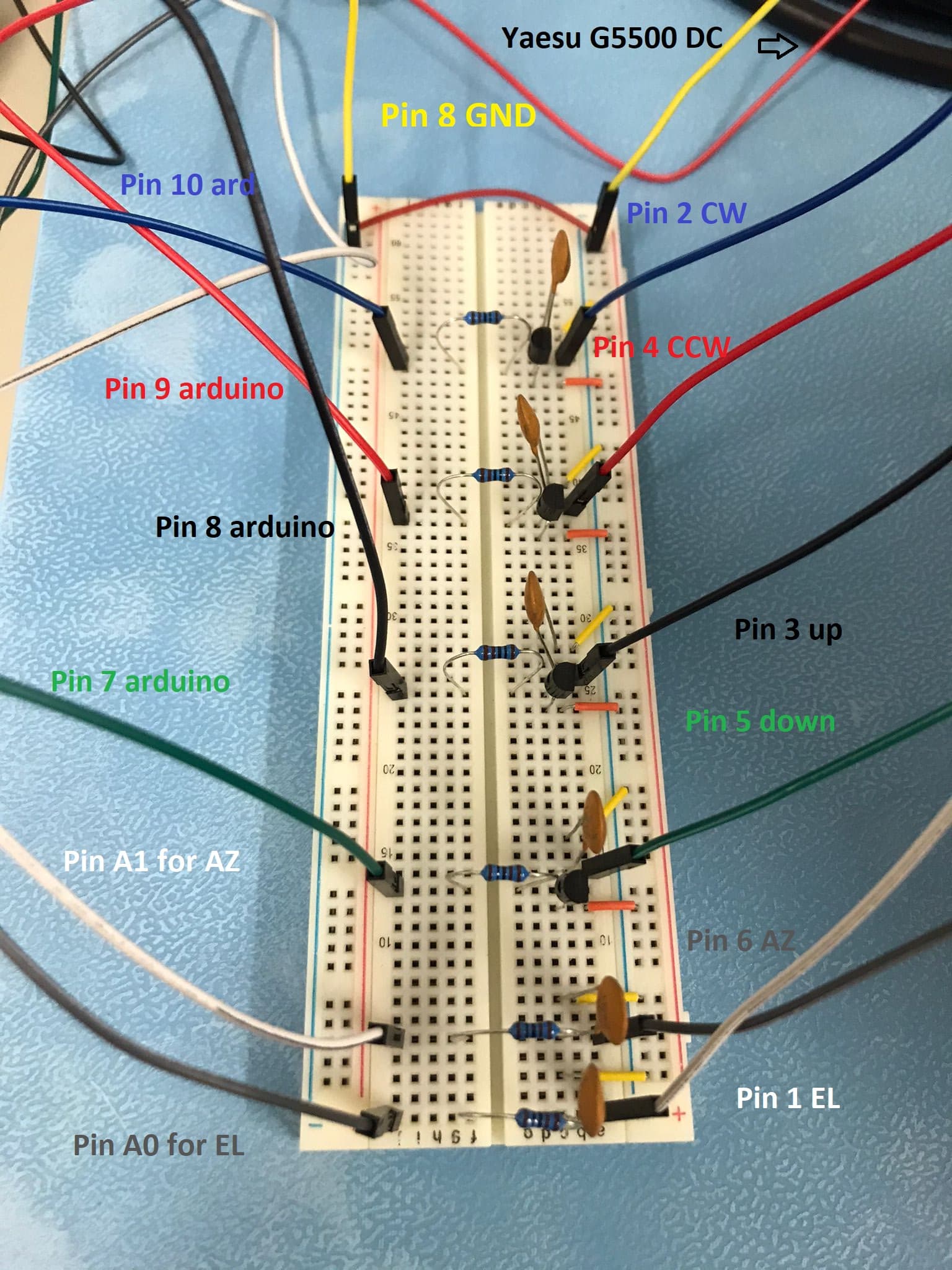
The only things I touched from the code were the pins:
CW: 10
CCW: 9
rot_analog_az: A1
UP: 8
Down: 7
rot_analog_el: A0
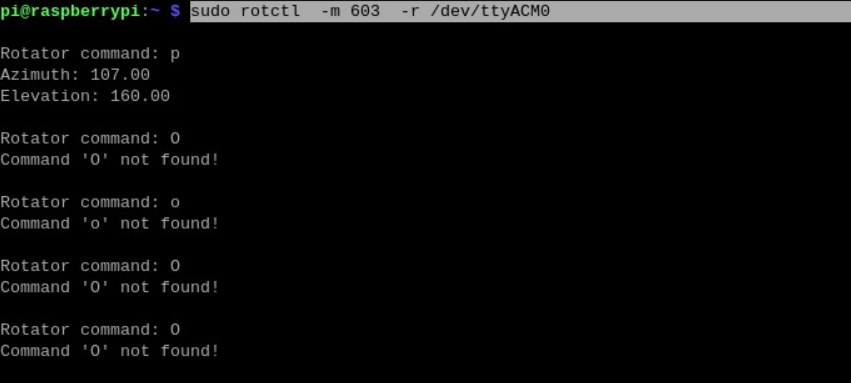
I wanted to test whether I could retrieve the current position of AZ and EL using the “p” command in the terminal, but I did not receive a response then I tried to manually change the AZ and EL with P 100 45 and I didn’t receive a response either:
Here some additional pictures of the setup:
Breadboard. The cable grey and white appear in the wrong position in the pic but they were later changed to match the actual color: