Hi. I have updated the operating system with sudo apt update and then sudo apt upgrade and now have:
uname -a Linux raspberrypi48 5.10.11-v7+ #1399 SMP Thu Jan 28 12:06:05 GMT 2021 armv7l
I used sudo satnogs-setup to update everything there:
Satnogs-client-ansible-202012231828, satnogs-client-1.4, satnogs-flowgraphs-1.3-1
I looked through the instructions on https://wiki.satnogs.org/SatNOGS_Client_Setup#Advanced_Setup
but I do not see a ttyACM0 in my devices folder /dev
The motors no longer turn if I setup a pass on the satnogs web page.
sudo rotctl -m 204 -s 19200 -r /dev/ttyAMA0 -vvvv gives me:
rotctl, Hamlib 3.3
Report bugs to hamlib-developer@lists.sourceforge.net
rotctl Test
rot_init called
initrots3_easycomm called
rot_register (201)
rot_register (202)
rot_register (204)
rot_open called
serial_open called
serial_setup called
Opened rot model 204, ‘EasycommIII’
rig_strstatus called
Backend version: 0.4, Status: Alpha
Rotator command:
but typing in p to get a position gives me :
Rotator command: p
rotctl_parse: input_line: p
rot_get_position called
easycomm_rot_get_position called
easycomm_transaction called: AZ EL
serial_flush called
write_block called
write_block(): TX 7 bytes
0000 41 5a 20 45 4c 20 0a AZ EL .
read_string called
read_string(): RX 2 characters
0000 e2 e2 …
easycomm_transaction read_string: ▒▒
easycomm_rot_get_position got response: ▒▒
easycomm_rot_get_position: unknown response (▒▒)
get_pos: error = Command rejected by the rig
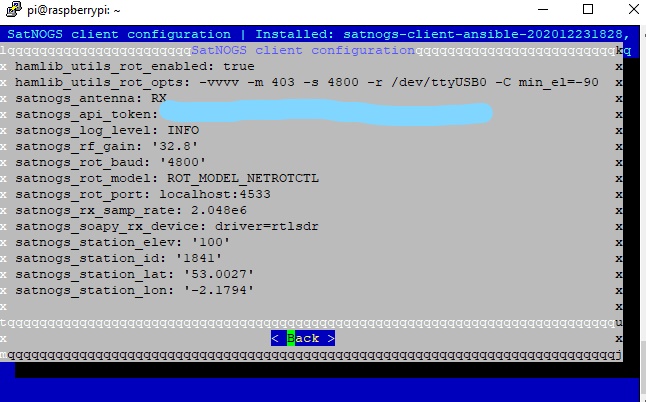
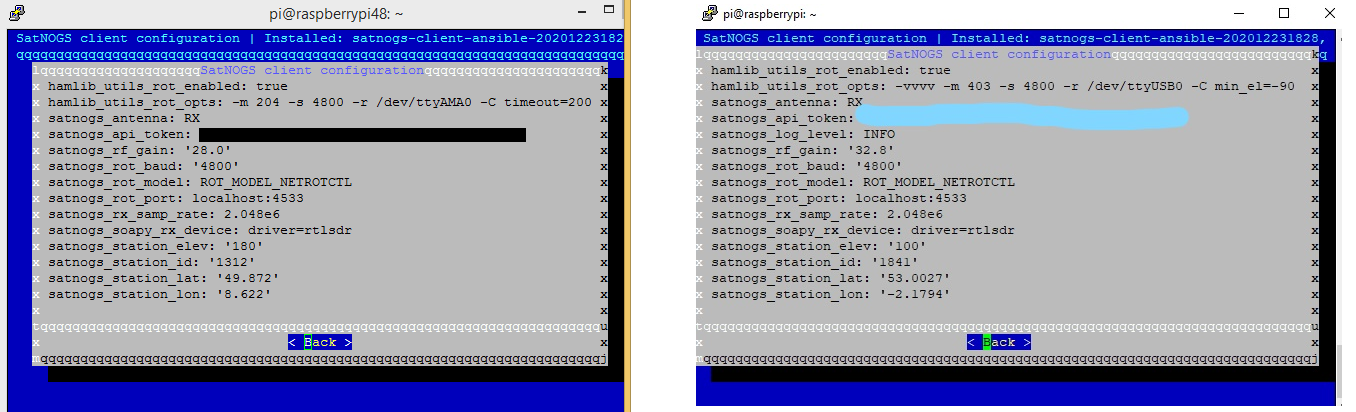
My configuration is:
SATNOGS_SOAPY_RX_DEVICE: driver=rtlsdr
SATNOGS_ANTENNA: RX
SATNOGS_RXSAMP_RATE: 2.048e6
SATNOGS_ELEV: 180
SATNOGS_STATION_ID: 1312
Satnogs installation: SATNOGS_STATION_LAT: 49.872
SATNOGS_STATION_LON: 8.622
Advanced:
network: none
radio:
SATNOGS_RIG_IP Define Hamlib rigctld IP [127.0.0.1]
SATNOGS_RIG_PORT Define Hamlib rigctld port [4532]
SATNOGS_DOPPLER_CORR_PER_SEC
SATNOGS_PPM_ERROR
SATNOGS_LO_OFFSET
SATNOGS_GAIN_MODE
SATNOGS_RF_GAIN [20]
SATNOGS_RX_BANDWIDTH
SATNOGS_ANTENNA [RX] already set in Basics
SATNOGS_SOAPY_RX_DEVIC [driver=rtlsdr] already set in Basics. Apparently not needed in newer software
SATNOGS_RX_SAMP_RATE [2.048e6] already set in basics
SATNOGS_DEV_ARGS
SATNOGS_STREAM_ARGS
SATNOGS_TUNE_ARGS
SATNOGS_OTHER_SETTINGS
SATNOGS_DC_REMOVAL
SATNOGS_BB_FREQ
ENABLE_IQ_DUMP
IQ_DUMP_FILENAME
DISABLE_DECODED_DATA
Rotator:
SATNOGS_ROT_MODEL: ROT_MODEL_EASYCOMM3
SATNOGS_ROT_BAUD: 19200
SATNOGS_ROT_PORT: /dev/ttyAMA0
SATNOGS_ROT_THRESHOLD 4
SATNOGS_ROT_FLIP False
SATNOGS_ROT_FLIP_ANGLE 75
Waterfall
Artifacts
Scripts
Paths
Hamlib:
HAMLIB_UTILS_ROT_ENABLED: True
HAMLIB_UTILS_ROT_OPTS : -m 204 -s 19200 -r /dev/ttyAMA0 -C timeout=200
HAMLIB_UTILS_RIG_DISABLED : False
HAMLIB_UTILS_RIG_OPTS : -T 127.0.0.1 -m 1
SNMP
GPS
Software
Debug
Can anyone see any errors in my settings that is stopping the motors turning?
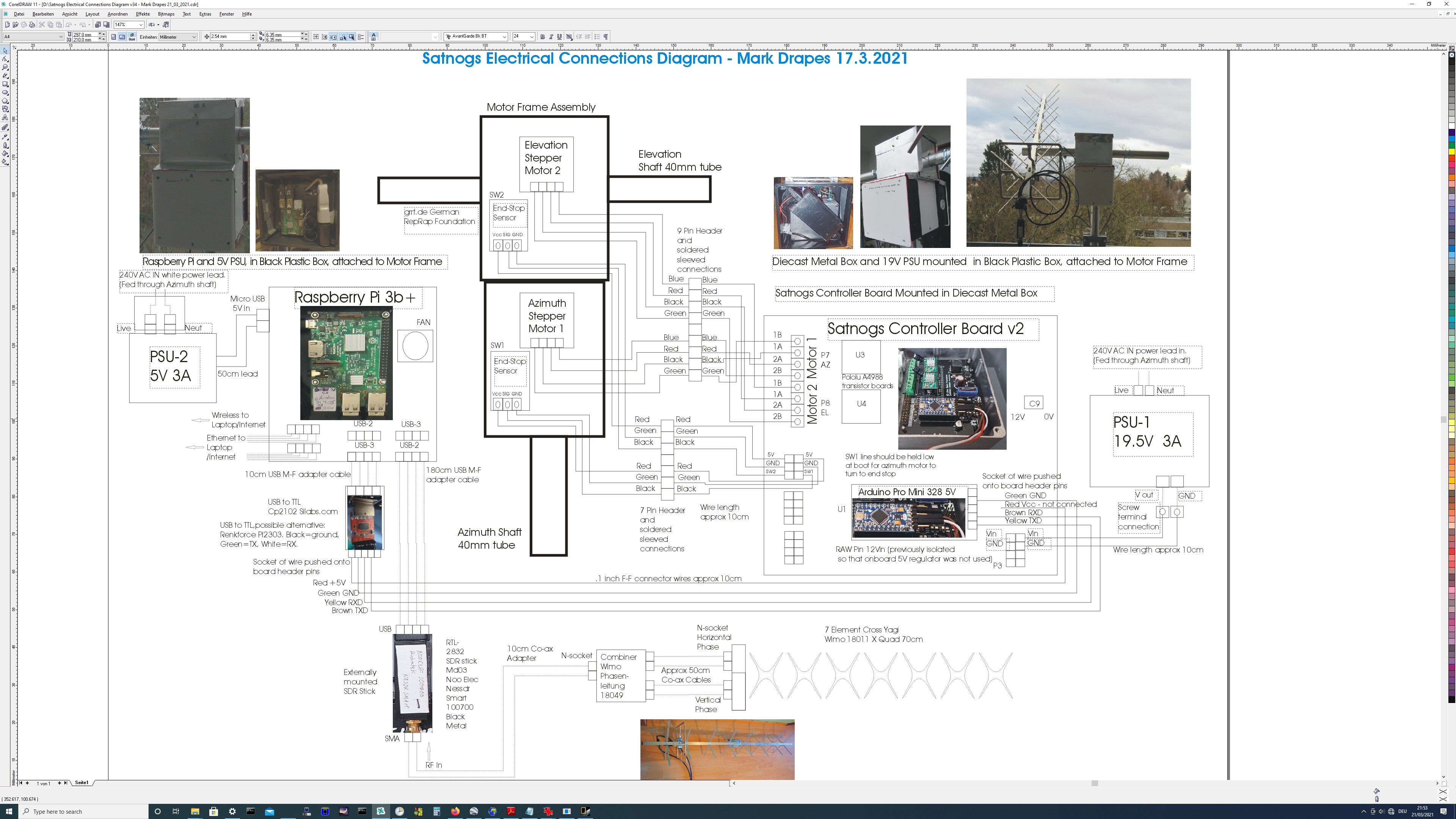
Incidently if I move the pulley belt so that the position is away from the end stop and power up rotator controller board (V2) the arduino correctly sends the motors to the end stop position.
Regards
Mark