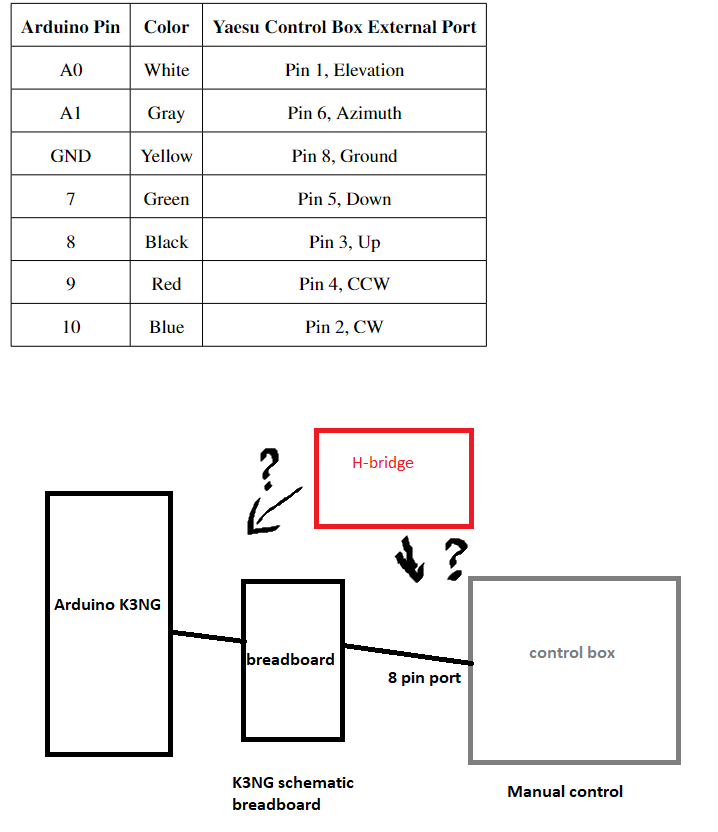
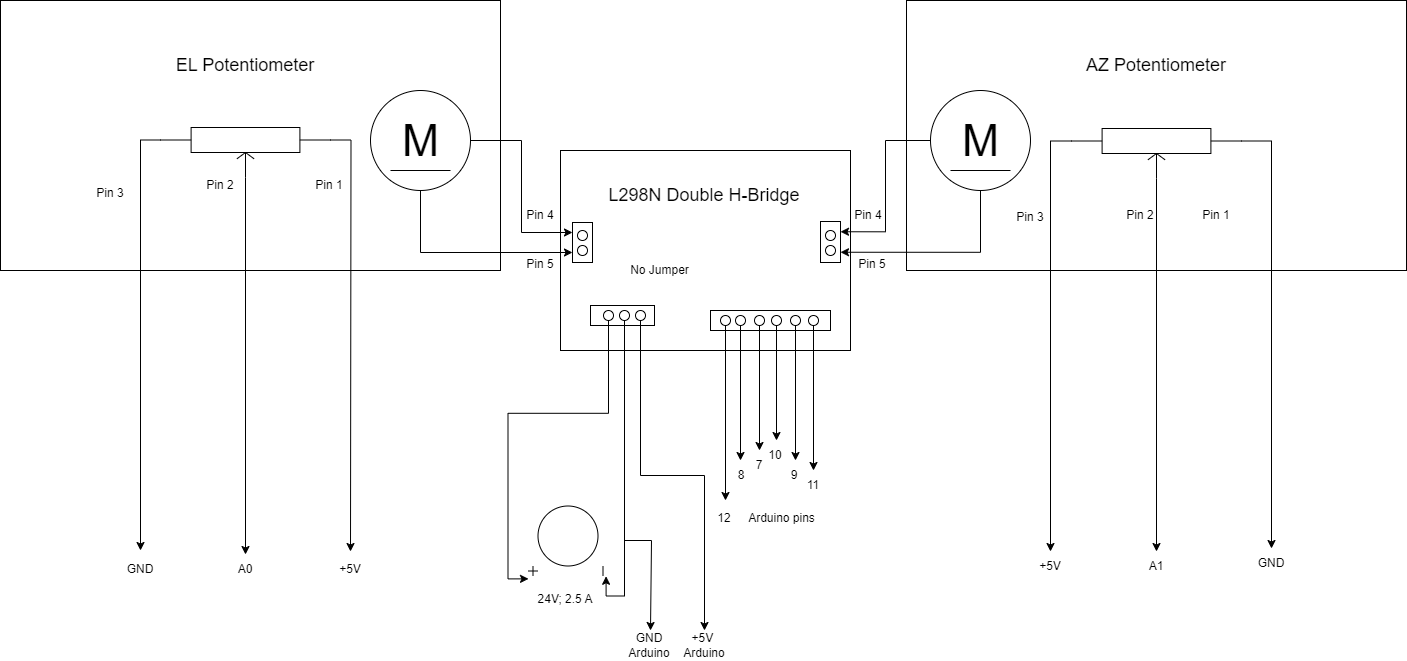
I just bought an H-Bridge to control the speed of the antennas that I got recently. I used it without the control box to move the rotators using the K3NG rotator controller, and it worked fine. This was done by following the instructions of Switched Multiple PWM Outputs. However, I was wondering if it is possible to use the H-Bridge in combination with the control box so I can still move the antennas manually and read the AZ and EL values from the box. To my knowledge, this configuration that I want to achieve falls in this section “Single “Always On” PWM Output / Yaesu Control Unit Interfacing”. But I’m kind of lost with this configuration. I created an interface by following the manual of the Yaesu and creating a connector with 8 pins (leaving pin 7 with no connection) using a breadboard and the Arduino. I made the same schematic of the wiki without the LCD display and buttons. I made a table for the interface without the H-Bridge that is shown below.
So, I don’t know which pin I should connect to the H-Bridge or in which position of the schematic should be placed.
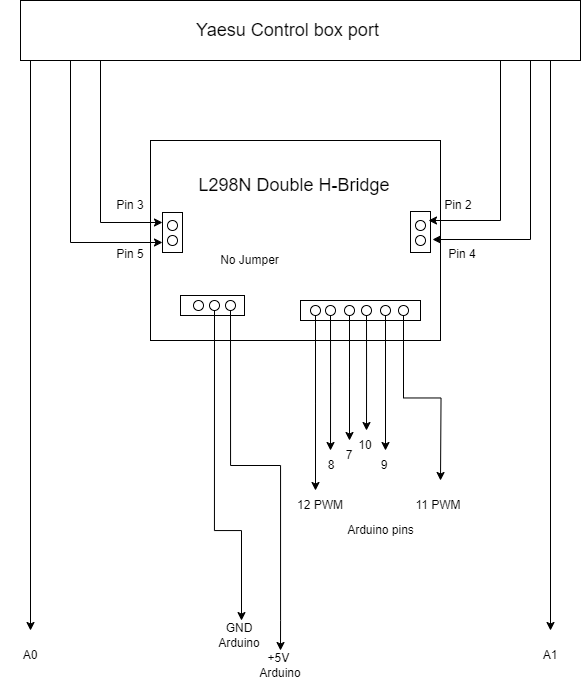
Since I got confused by this line on the wiki: “The Yaesu X1, X2, X3, and X4 speed commands are supported through a pulse-width modulation (PWM) pin connected to the Yaesu rotator controller, pin 3”. Yet pin 3 controls the up command
I was wondering if instead of the pin 4 and pin 5 of the rotators I can attach or connect the pin 3, pin 5, pin 4 and pin 2 of the yaesu control box external port to the H-bridge schematic. Would that work? My concern would be the 24 V power supply to the H-bridge and the control box.
I’m getting confused (:
Just guessing here, you find the bang-bang control too rough and want a smoother one, and the pwm solves that.
You didn’t build the UI part on the k3ng controller, so only having a computer to control it ?
Wanting to have a UI, the old control box looks like a alternative, how to hook it up ?
This leads to gutting the control box and replacing the electronics with the k3ng and pwm bridge, pretty much.
Or, add the buttons and LCD to the k3ng and let the original control box stay unmodified.
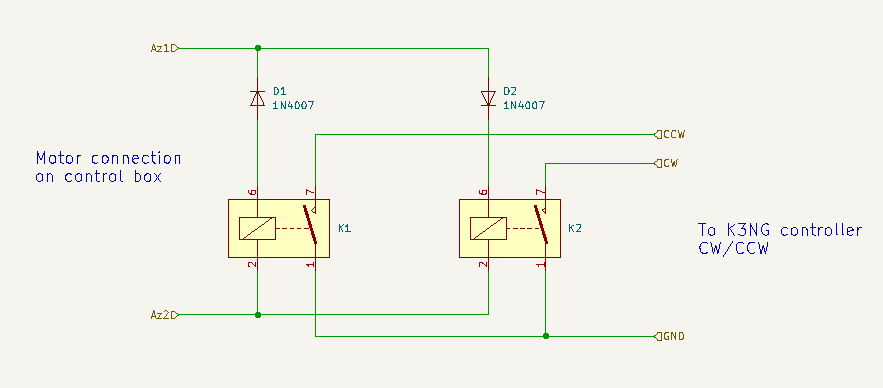
It might be possible to put two relays on each of the original control box motor connection, with series diode in each direction, so the relays energize on the rotational direction commanded. The pots needs to be hooked up to the control box and connecting the ground and wiper to the arduino, 5V supplied from the control box. YMMV!
I want to control the speed of the rotors since I like smooth movement. That’s why I initially set up the system without the control box, and it worked fine, as you can see in my first reply comment. However, after seeing that, I wanted to read the values of the AZ and EL, so I decided to add back the control box, and control the antennas manually as well.
First, I tried the schematic of the K3NG without the H-bridge, LCD, and buttons. This, of course, resulted in the rotation being at full speed. Then I thought, there might be a solution to combine the H-bridge with the external port of the control box to regulate the speed without ordering buttons or an LCD right now. Why not try it without wasting money? I know they are cheap, but why not give it a try?
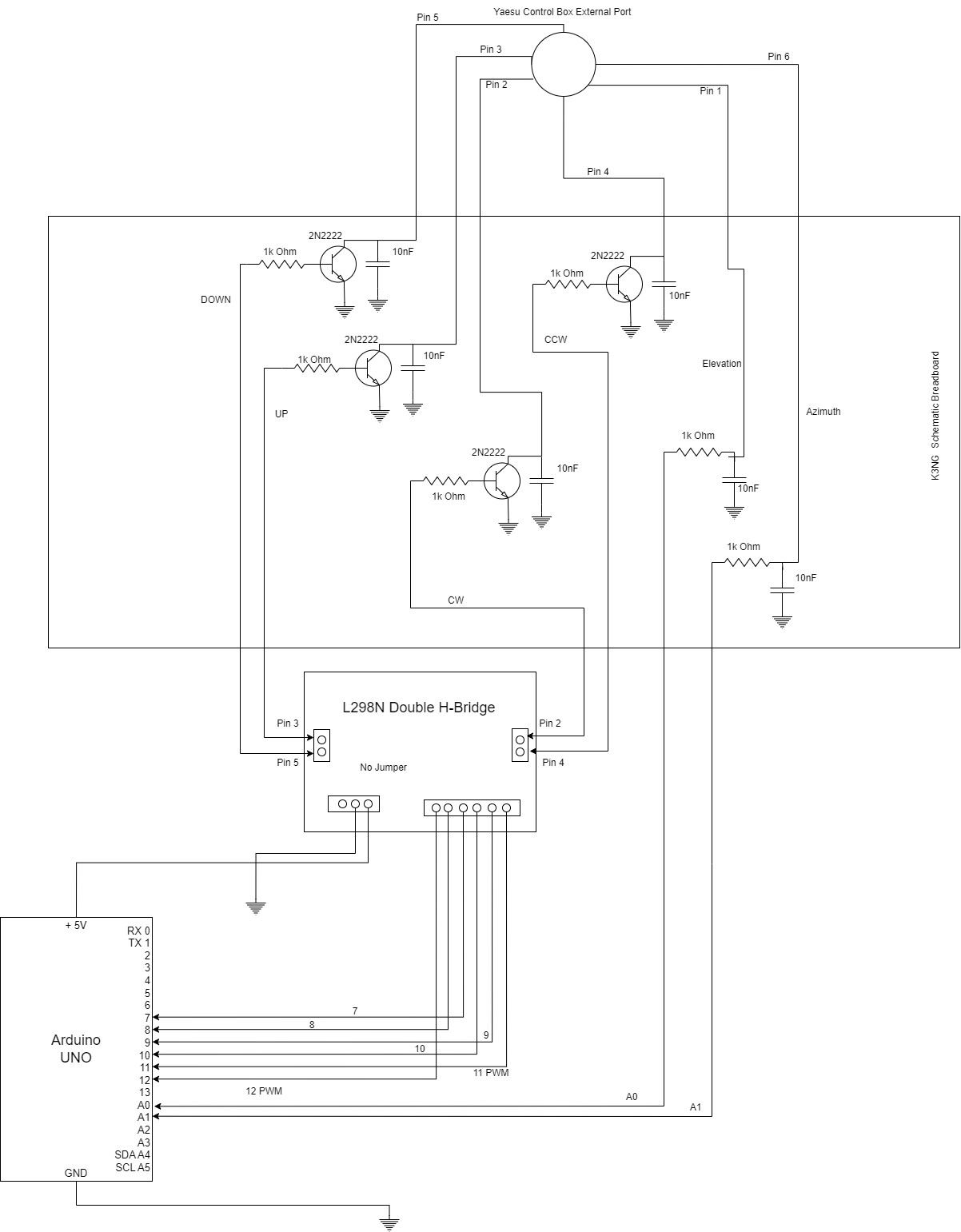
So, I’m trying to combine them both. I made a schematic combining the K3NG schematic from the wiki with the H-bridge, but I’m not sure if anyone has already done this. Here is the schematic I did: The circle at the top represents the 8 pins external port of the yaesu control box. The rectangle in the middle represents the breadboard and the components that the K3NG suggest using, The rest is the H-bridge and the Arduino. Feel free to give some advice
First off, you cannot pwm control the original control box, there is no point in feeding it that kind of signals as it is relay based.
The last schematic makes very little sense, the pwm is controlling power transistors in the H-bridge, which then control small signal transistors, which then controls the relays in the original control box which power the motors.
What I explained in the last part of my message was to connect the pots to the original controller, then taking the control box outputs and feeding it to the analog input on k3ng controller, this completely solves the position part. This actually is how it is intended to be connected in all the common instructions.
The only thing you need to modify is the motor control.
Using the motor outputs from the original control box to power two small relays which becomes the buttons for the k3ng controller to signal up/down and cw/ccw.
The diodes filter out the direction.
You need 4 small relays in total. You can use opto couplers instead, but need to make sure they do not falsely trigger.