Hello, I’m trying to control my SatNOGS Rotator V3.1 using a Raspberry Pi and Gpredict connected directly to the Arduino so I can VNC the Raspberry Pi and wouldn’t need to use long usb extender from rotator to a PC.
The setup works fine when running on Windows but when I run on the Raspberry it wouldn’t send commands to the Arduino, though I can connected the Arduino to Pi just fine (using the Easycomm II protocol). It just wouldn’t move when I clicked engage and no commands running/scrolling on the terminal like it would on Windows.
*nb: I already installed hamlib on the Pi
Any idea what I’m missing?
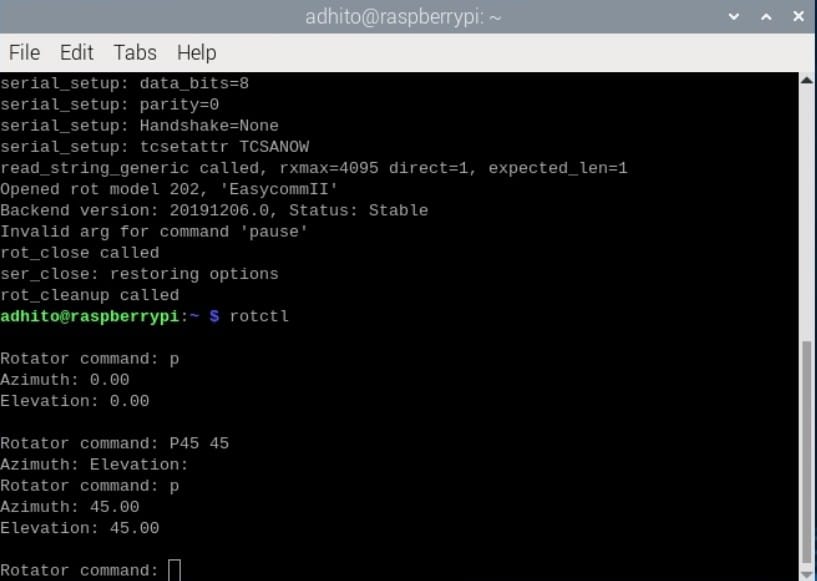
Update: I finally understand what the difference between rotctl and rotctld . So I tried to command manually on the terminal using rotctl command and enter p for rotator position and P$az $el to command the rotator to move to that position. Again, it worked for Windows but not for Raspberry Pi.
I tried to move to higher number and check if the number is moving and well, it is, though the actual rotator isn’t. Does it mean I have connection problem to the Arduino from the Raspberry Pi? Well, at least my question is does Raspberry can control the Arduino through USB?
Thanks!
Well, finally got it running! For those who having the same problem with me, just try running this command:
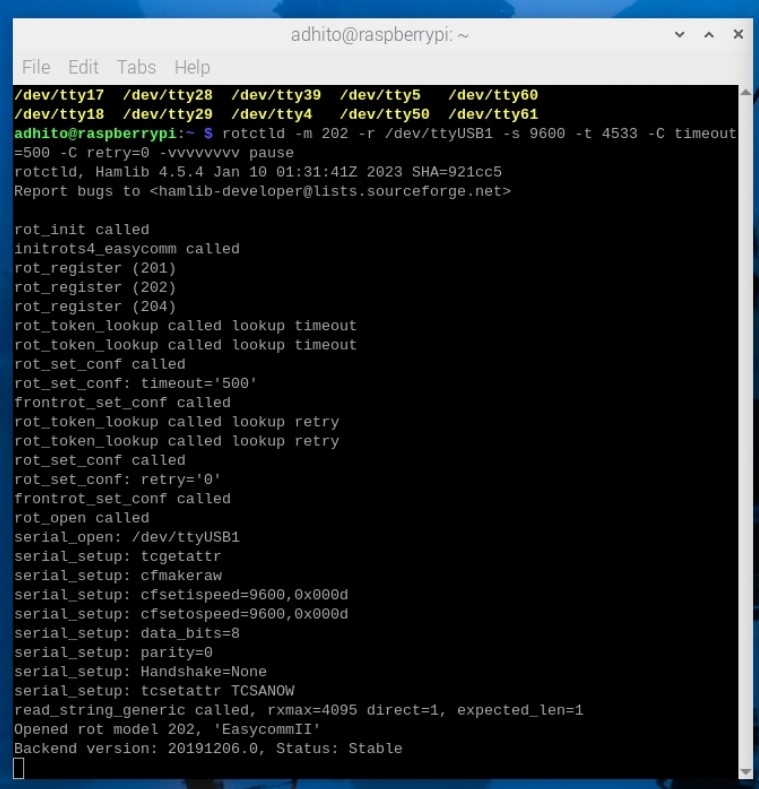
rotctld -m 202 -r /dev/ttyUSB* -s 9600 -t 4533 -C timeout=500 -C retry=0 -vvvvvvvv
Where the asterisk on /dev/ttyUSB* mean number of the port where your Arduino is connected via USB. You can check the port by typing /dev/tty* on terminal and it’ll show you the list.
I fixed it by deleting the > pause at the end of the original script, don’t know what it does but it’s working now. Forgive me, I’m a Linux/Raspbian begginer, maybe the experts out there would facepalming their head after seeing this post  .
.
2 Likes