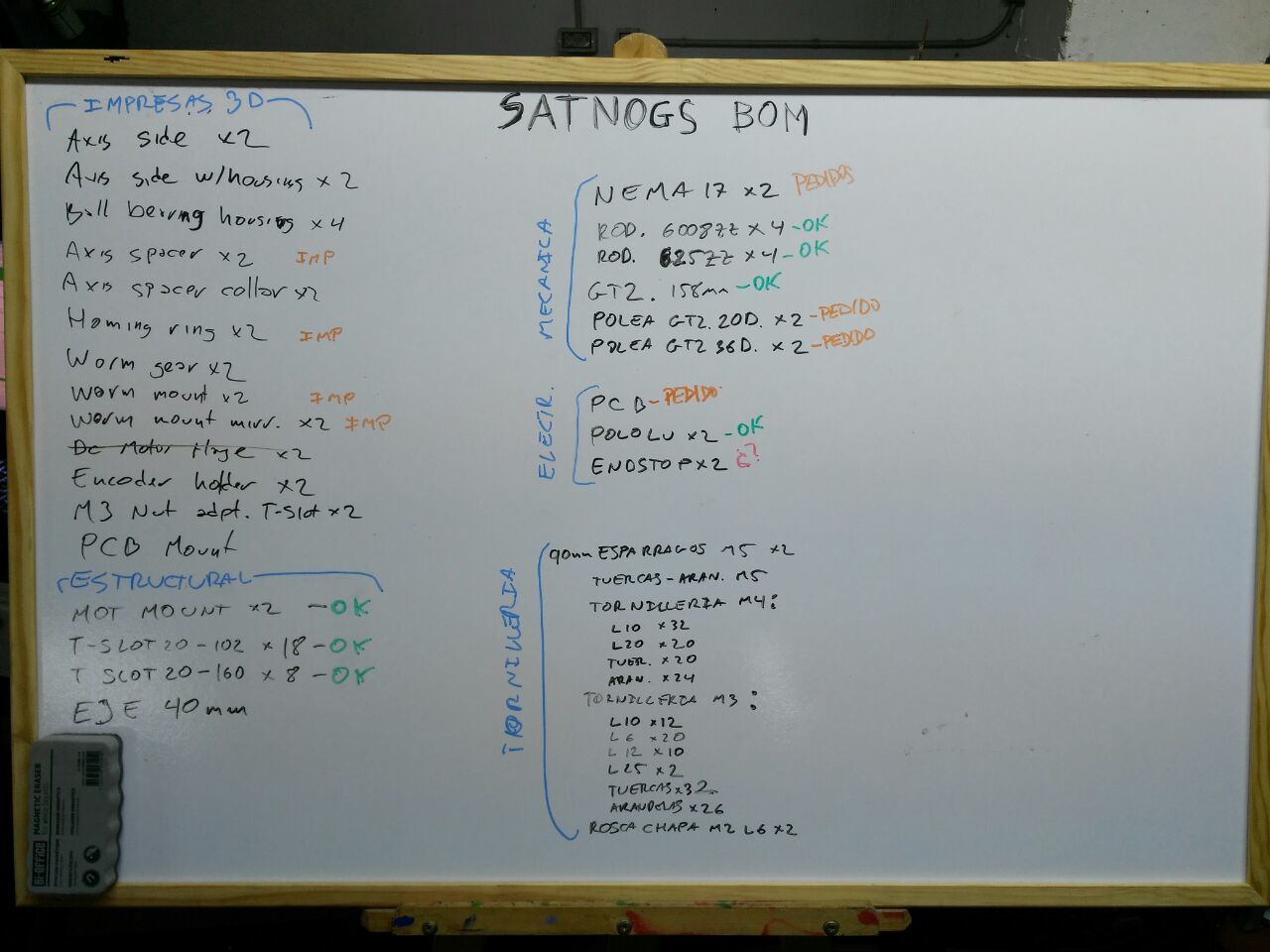
Did you order your 2020 extrusions pre-cut? i I just cut mine yesterday and did an aweful job. I wish I would have forked out the extra at Misumi and had them cut for me.
Yes, I ordered them precut at motedis spain. It wasn’t cheap, about 100€ with the corners and nuts, but it was worth the money, the cuts are just perfect.
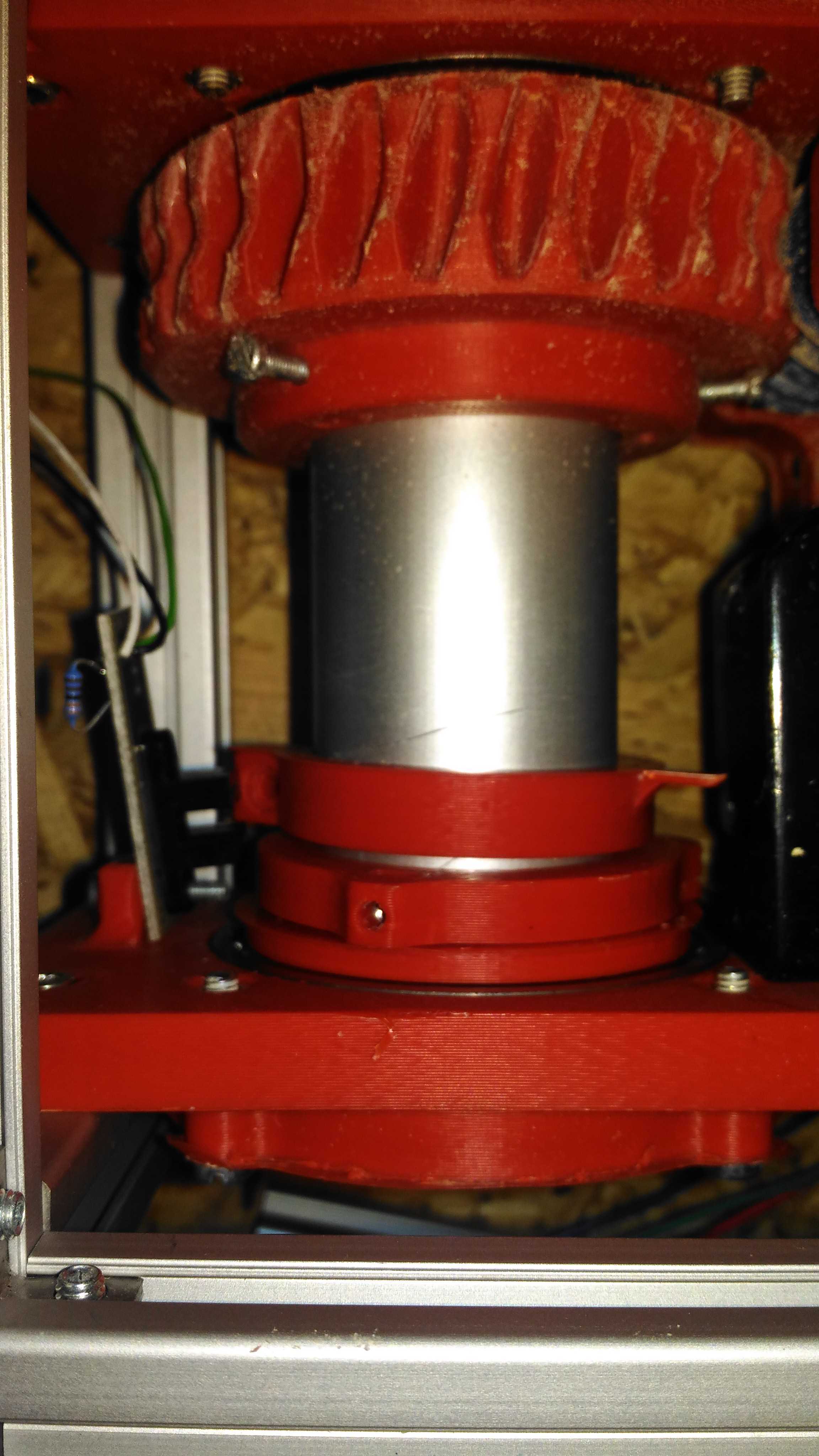
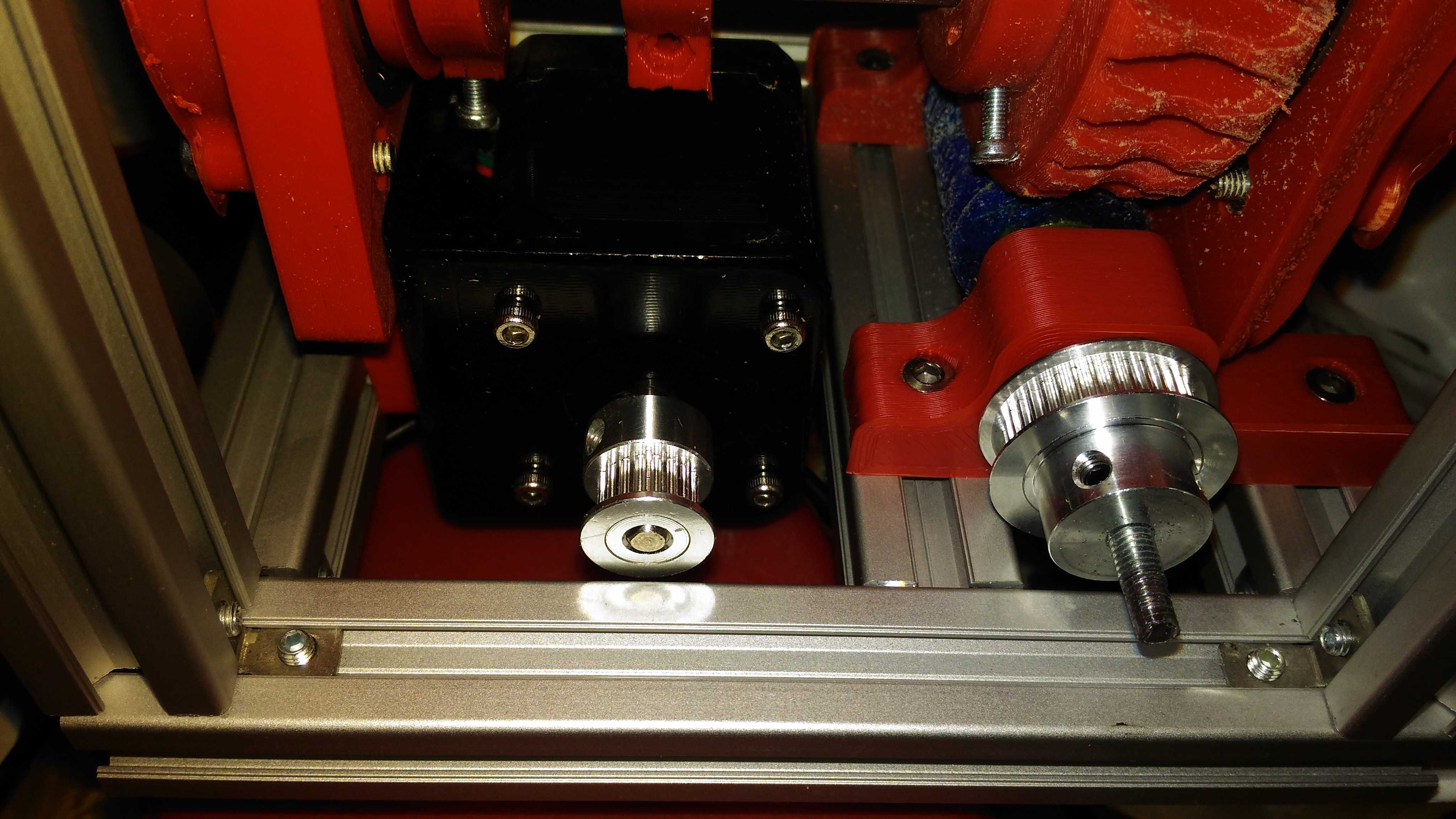
The instructable tells me to loosen the screws and tighten them to put tension on the pulley. This works on one side only, on the other side there is no chance of loosening and tightening the hidden corner screws:
Here is my recommendation for solving this problem and for a better stability of the pulley belt (which has its tension only between two set screws). Increase the length of the 4 long bars so you can attach hidden corners also on the outside and you get something of an “H” structure.
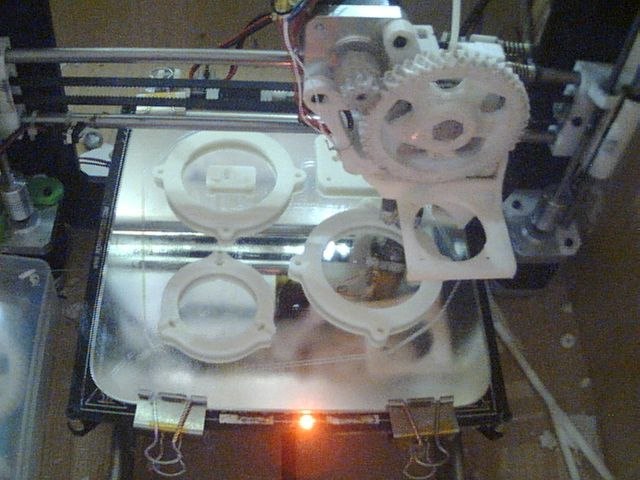
For me the Run-In of the Worm-Gear was urgently necessary. Before that it was almost impossible to move and it was a very tight fit. I assume the Run-In is not optional but mandatory at this point but it not documented anywhere. Furthermore the axis of the worm gear should have a sufficient length so you can attach a electric drill in the first place: