I am trying to capture some satellite images and utilize stvid repository of cbassa. It was rather complicated here so I followed the steps of @jebba shared in this clone (I tried to reach out @jebba in some other way but I could not, so here I am ).
I have a ZWO ASI1600MM Pro camera and I have followed every step and they are all working. The step I am stuck is this:
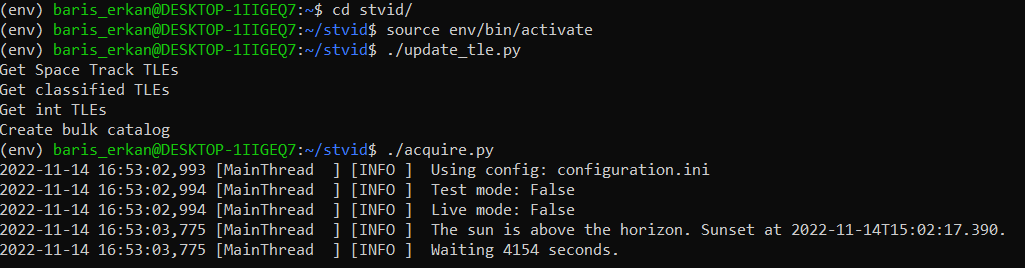
Basically nothing happens after this point on. I would expect it to see my camera and you know give some info about it before acquisition of images, but it gives me nothing. I am really new to these Linux environments so apologies for trivial questions in advance.
Hi! The software waits until it is dark enough to start filming. You can overrule this by running:
. /acquire.py -l -t 300
The -l will show a live view and the -t will start test mode immediately for 300 seconds.
Here is the section for configuration.ini which specifies the ASI1600MM Pro settings. This is what I use. As @EelkeVisser explained, the -t option allows you to test operation during daytime, and the -l option will give you a live view. Adjust the path the the ASI camera library in the last line.
[ASI]
device_id = 0
nx = 1552 # Camera horizontal pixel count
ny = 1172 # Camera vertical pixel count
bin = 3 # Binning factor (1: 1x2, 2: 2x2 etc)
exposure = 100000 # Exposure time in microseconds
nframes = 100 # Number of frames for each image
gain = 300 # Camera gain
maxgain = 300 # Maximum gain (for autogain; starts at gain)
autogain = True # Use autogain
brightness = 10 # Target brightness of pixels
bandwidth = 90 # Bandwidth usage (percent)
high_speed = 0 # High speed mode (0 for False, 1 for True)
hardware_bin = 0 # Hardware binning (0 for False, 1 for True)
sdk = <path_to>/lib/x64/libASICamera2.so # Path to SDK
Once you get this to work the difficult bit will be to install dependencies. It may actually be easier to stick to the dev branch which is predominantly python based (but has less documentation), as it is not yet completely finished.