with an other error popping up. With AZ < 180 degrees the elevation works OK and with AZ > 180 degrees the elevation reverses.
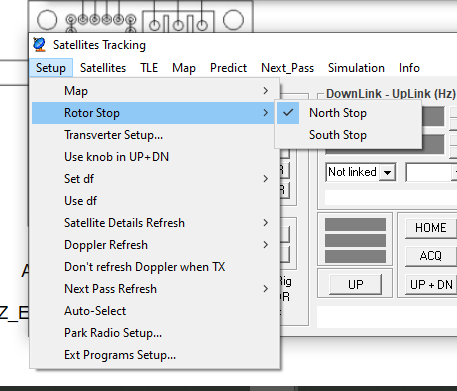
In PST rotator I had to set Rotor Stop to North stop (being at 360 degrees) but that was still set for South stop from my normal antenna rotor.
running some tests now if I have to revert my change of wiring
My unconfirmed idea for tomorrow would be:
Remove the small gear from the AZ multiturn. Let the motor run and rotate the AZ gear 180 degrees. Re-attach the small gear. That should make the EL working as expected.
What about putting the code on a gitlab?
That’s part of the plan but I have not done that before.
One of the settings in the original (unmodified) arduino code set the max azimuth at 450 degrees.
I have a large gear with 100 teeth , and the potmeter gear has 10 teeth. So, one turn of the large gear (AZ) , 360 degrees, makes the potmeter rotate 10 turns. There is no space in my brain to make this setup work for 450 degrees, unless I set minimum AZ to 90 degrees which, I think, absolutely makes no sense.
Movie made in Hyperlapse, so 7 minutes is compressed to 24 seconds, in the last seconds it moves to 355 degrees but the satellite disappeared before the full turn was finished ![]()
3 Likes
Just short for info:
Moved ROTCTL(D) to a separate Pi
rotctld -m 602 -s 9600 -r /dev/ttyAMA0 -t 4533 --set-conf=min_az=1, max_az=359,min_el=2,max_el=100
and set the rotor in station 3442 to
SATNOGS_ROT_MODEL=ROT_MODEL_NETROTCTL
SATNOGS_ROT_PORT=192.168.0.1641:4533 (this is the rotor controller Pi)
unset the SATNOGS_ROT_BAUD
(as from a reply from Daniel Advanced rotor settings? No reset, no angle limitation, parking - SatNOGS / Software - Libre Space Community )
This all because the direct rotor control from station 3442 by USB connection to the Arduino Nano gave intermittent signals in the waterfall, with the antenna still being fixed and outdoor.

2 Likes
Good Day.
I have the rotor printed and built up with it’s motors and pots but i’m fighting with the code from the original file. Any chance you could share you code and help a guy out.
Thanks
Karl.
1 Like
Sure ! Let me find the latest version I am running and the / a way to share it.
1 Like
My file as currently being used:
No licensing message, no copyright info available at this moment.
Please let us / me know what problems you run into
73’
Ben
2 Likes
Thank you.
Finished cable wiring for the mount on the TV stand, testing dry run, controlled by station 3442 but that station still connected to it’s fixed outdoor antenna.
Strange things noticed: Timed out messages on rotor control and strange results in the received signals.
Timed out messages appear to have disappeared after changing the ROTCTLD model to 601 (GS-232A) instead of 602 (GS-232)
Now changed the rotor setting in satnogs-setup to 1 degree instead of 4 degrees to check if that has positive results for the waterfall / received signal.

1 Like
Step bij step… Recognized with help from Satnogs enthousiasts that this is caused by the doppler correction running behind. Which is caused by this rotor interface software not sending back the AZ and EL to the rotctl Pi after which the request times out and the doppler correction can continue (timeout is about 2 seconds)
While there is alternative rotor control software available which has to be modified to support this hardware choise I decided to try the way to adapt this current software and have it bi-drectional communicating with the rotctl and actually sending back the AZ / EL values.
To be continued
3 Likes
Yesterday I mangaged to add feedback to the Nano, now gpredict mostly shows the feedback AZ and EL values. Need one small change / addon, to only reply to rotctl on “C2” request, currently sending AZ / EL values on “C” request.
After a lot of struggling…
The AZ EL pI was running Hamlib 4.5 and the Satnogs Pi was running 4.0 , which made it impossible to control the rotor by rotctld, because every AZ and EL value showed to be out of range of the allowed values “00:00 - 00:00” .
With help from PE0SAT and SA2KNG I managed to update the Hamlib version on the Satnogs Pi ( /repositories/home:/knegge:/branches:/home:/librespace:/satnogs-unstable - openSUSE Download )
Had to update / install libhamlib. libhamlib dev and libhamlig utils, to find out with help of Daniel I had to update python3-hamlib too to fix the Satnogs station trying to address the rotor controller on 127.0.0.1 instead of 192.168.0.186
So now my station 3442 does observations, and there is no longer a problem with the waterfall / doppler correction.
4 Likes
So, after running and rotating for several hours it ended in an error condition. After leaving it unattended and returning to the shack (radio amateur name for the Main Equipment Room) I noticed scheduled obs where finished. Climbing to the attic revealed a motor noise, which I stopped by pressing one of the manual movement buttons (those are guided by diodes to one pin of the Arduino Nano making it stop excecuting movement commands)
Cables where to short, it somehow over rotated. AZ was at 5 degrees, which looked close enough, but manually rotating either left or right did not change AZ value on display. Rotated backwards 360 degrees to release the cables, no AZ display change. Those gears are not really tight connected to the potmeters, making it not break them if rotation is out of mechanical limits.
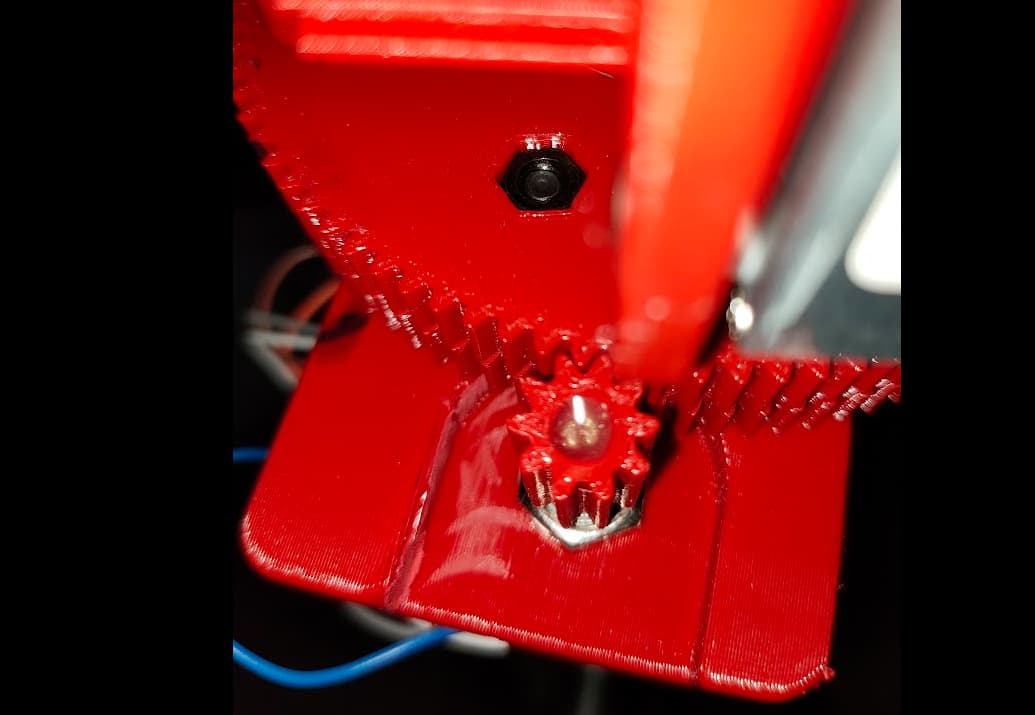
Took a look outside (motor was still outside the top roof window) to notice there was no gear on the AZ potmeter. I found that one back on the floor of the attic, completely in good condition.
So, now I assume with the rotating / vibrating the gear just came off from the potmeter / multiturn.
I was still in the decision moment for either locktite or superglue to mechanically lock the gear to the potmeter, so now I decided to make the hole in the top of the gear also 5 mm diameter and add hotglue to that hole to fix the potmeter and gear together without making it 100 percent permanent.
After that I am going to rethink the cable wiring route, as Jan PE0SAT mentioned it would be better to fix the cables to the other side of the rotor, making only space for 180 degrees either left or right necessary. Never thougt of that, might become usefull for the ham radio rotator too.
Now the hotglue is hot enough, so back to the construction part again.
Edit:
Considering max rotation time and max rotation without AZ or EL value change as add-on to the software.
3 Likes
Anybody having commuication issue(s) between the USB/Nano controller and host running rotorcld or any other software using Yaesu GS-232 protocol?
Frank…
Hi Frank,
totally no communication issues. My Nano has the +5 V output from the motor control bord via an 1n4007 to prevent the motors to keep running from the 5 V (USB) from the Nano when disconnecting the +12 volt to the motor control board.
Pse share some pictures from your setup / wiring.
Ben
1 Like
Thanks
I’m looking at using a different rotor control that I know works. I will be happy to post pictures when I have things done.