
I set up ground station #2733 (above) with a Yaesu rotator and Yaesu USB controller. It worked well with satnogs-client for a few months including the latest upgrade. The Yaesu products are readily available in the USA (from DX Engineering in my case). But the AZ rotator failed. The rotator isn’t designed for continuous use and I had been scheduling on cron pretty much non-stop, likely causing early failure.
A bill of materials and notes on this setup are available here:
Since the Yaesu isn’t rated for continuous operation, a different rotator was selected. After some digging and suggestions in matrix, I decided to get an Alfa Spid RAS with Green Heron RT-21 Az-El Controller.
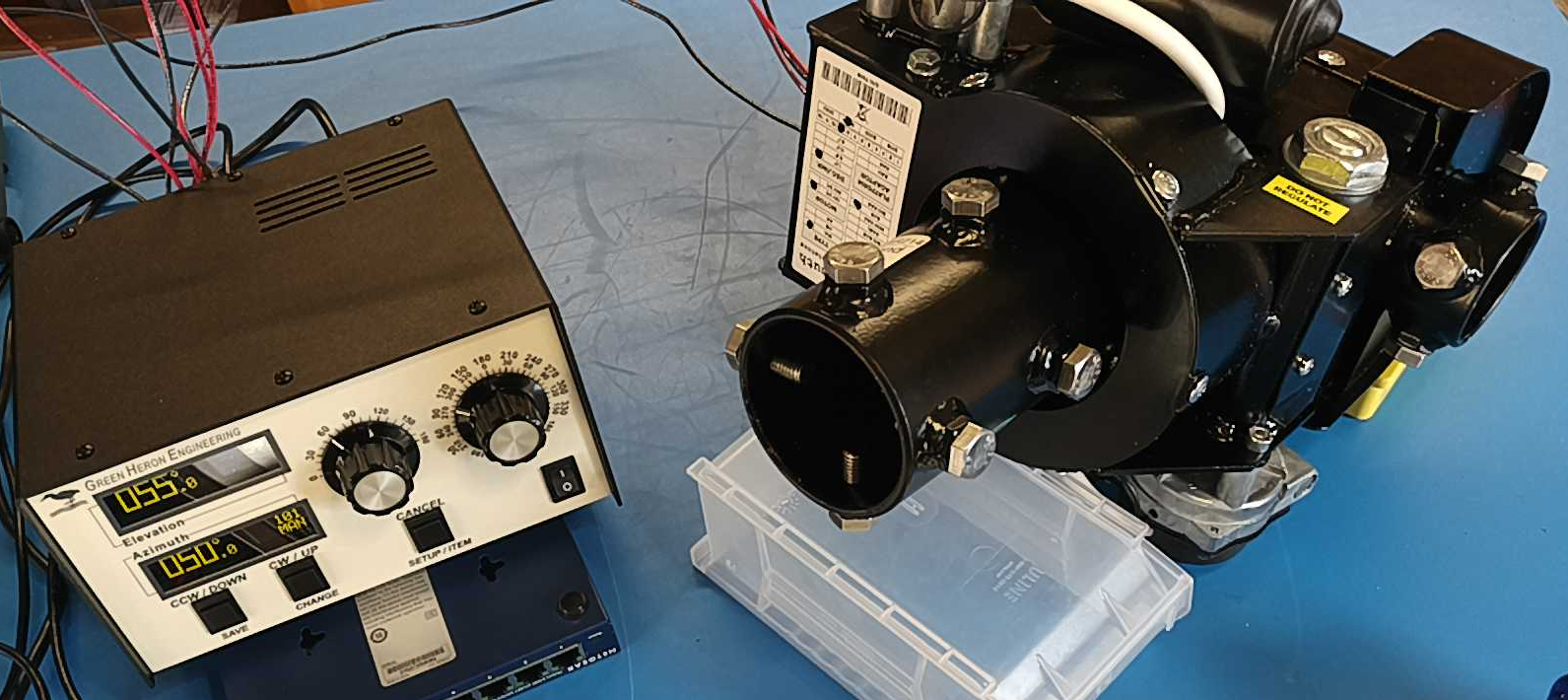
I received it in ~two weeks, with the rotator coming from Canada and the controller shipped from the USA. I presume that Green Heron used Alfa Radio Ltd for a drop shipping distributor:
One thing that is immediately clear is the Alfa Spid RAS is a major upgrade from the Yaesu. The the two Yaesu rotator parts are 4.5kg, compared to 14.4kg for the Alfa. It looks and feels much more heavy duty than the Yaesu.
The Green Heron RT-21 Az-El Controller doesn’t work out-of-the-box with the satnogs-client software. There is RT-21 support in Hamlib for 10+ years now with device 405 (-m 405), but it only supports either Az or El, but not both. The reason for this, is the RT-21 Az-El controller uses one USB port for each. For control, two USB cables are used for two devices, such as /dev/ttyUSB0 and /dev/ttyUSB1. Hamlib only support(ed) one USB device for control.
At one point, greenctld, a libre driver, was written for the RT-21 Az-El controller. It listens on a TCP port and functions similar to rotctld. It is in Python 2 though, which is obsolete.
With cluebats from matrix I was able to port greenctld to Python 3 and it is working:
I don’t quite see the best way to connect this greenctld to satnogs-client.
After all that, I saw that the latest versions of Hamlib now include control with two USB ports, for use with RT-21 Az-El controller. The command line option in rotctl looks like this:
-R, --rot-file2=DEVICE set device of the 2nd rotator controller to operate on
The version of Hamlib that supports a second rotator controller isn’t used by satnogs-client, which has an older version of Hamlib.
Edit: Currently satnogs-client uses Debian Bullseye’s Hamlib version 4.0-7. The dual USB control was added to Hamlib 4.3, with additional “features”, such as stop currenly in Hamlib HEAD, but not tagged yet.
At this point, it seems my options are:
- Configure
satnogs-clientto usegreenctldinstead ofrotctld. - Patch
satnogs-clientto use recent Hamlib (no changes to Hamlib). - Patch Hamlib with backported dual USB patches (no changes to
satnogs-client). - Other.
If anyone has this particular setup or has suggestions which would be the best way to go, it would be appreciated, thanks!