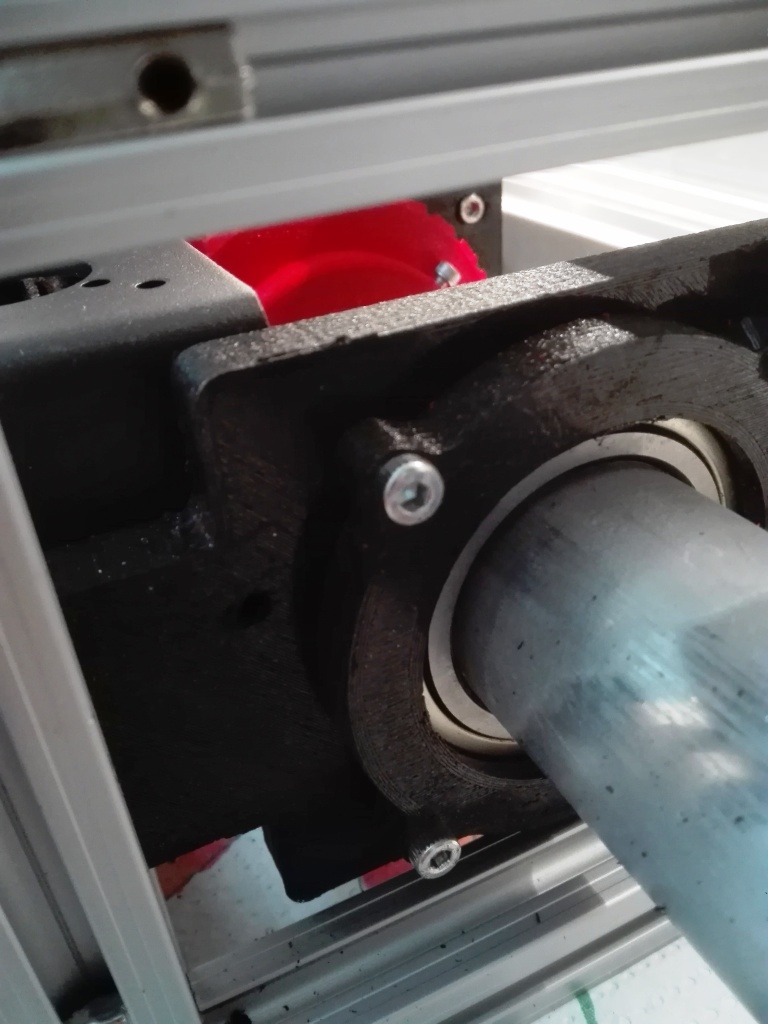
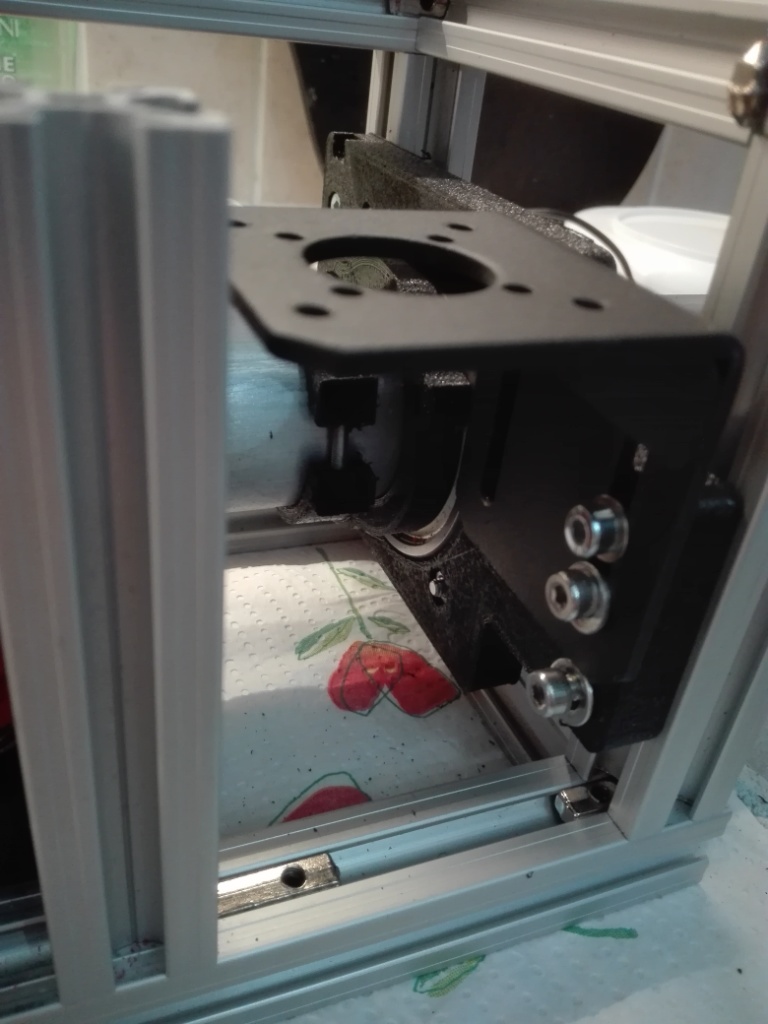
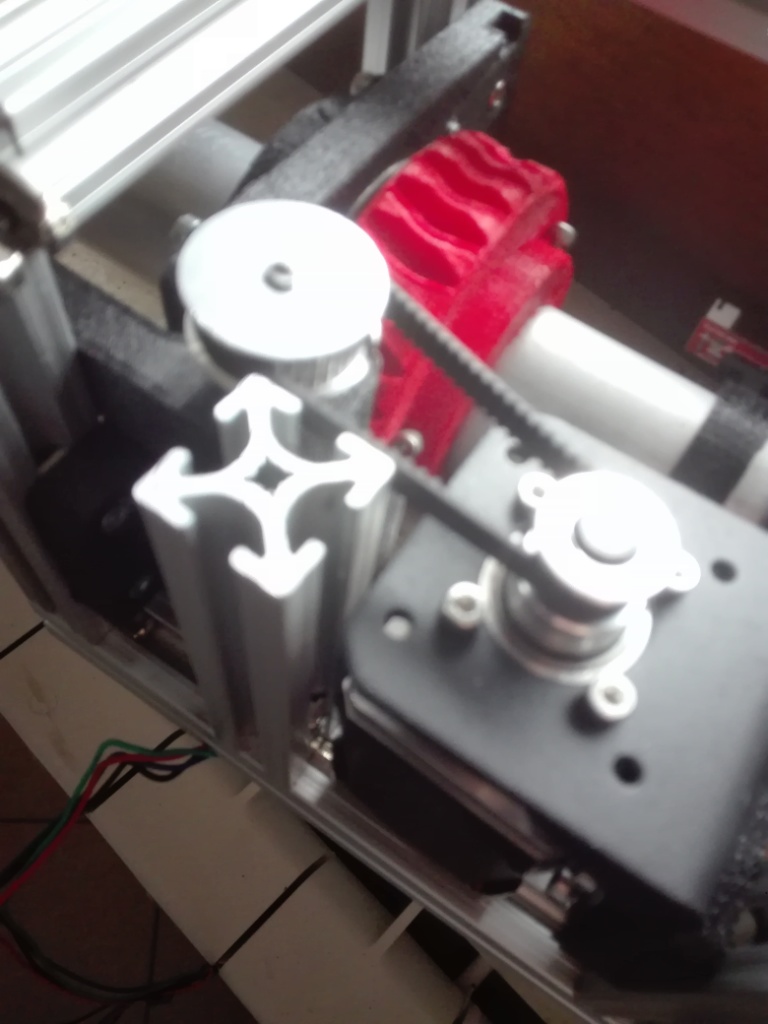
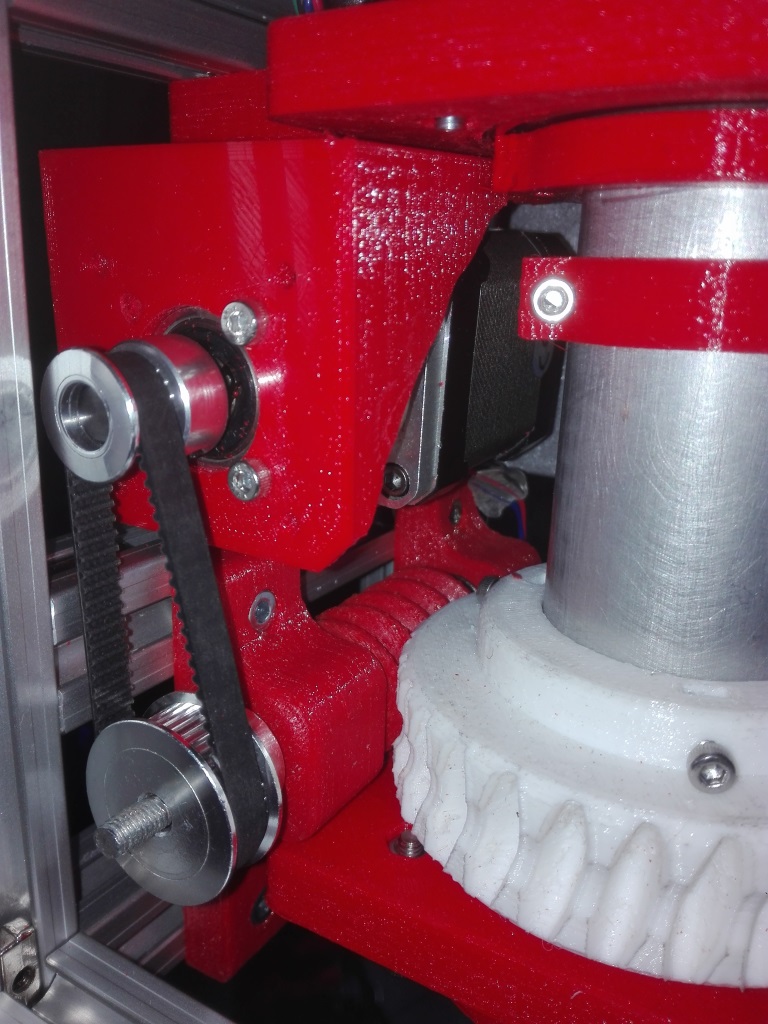
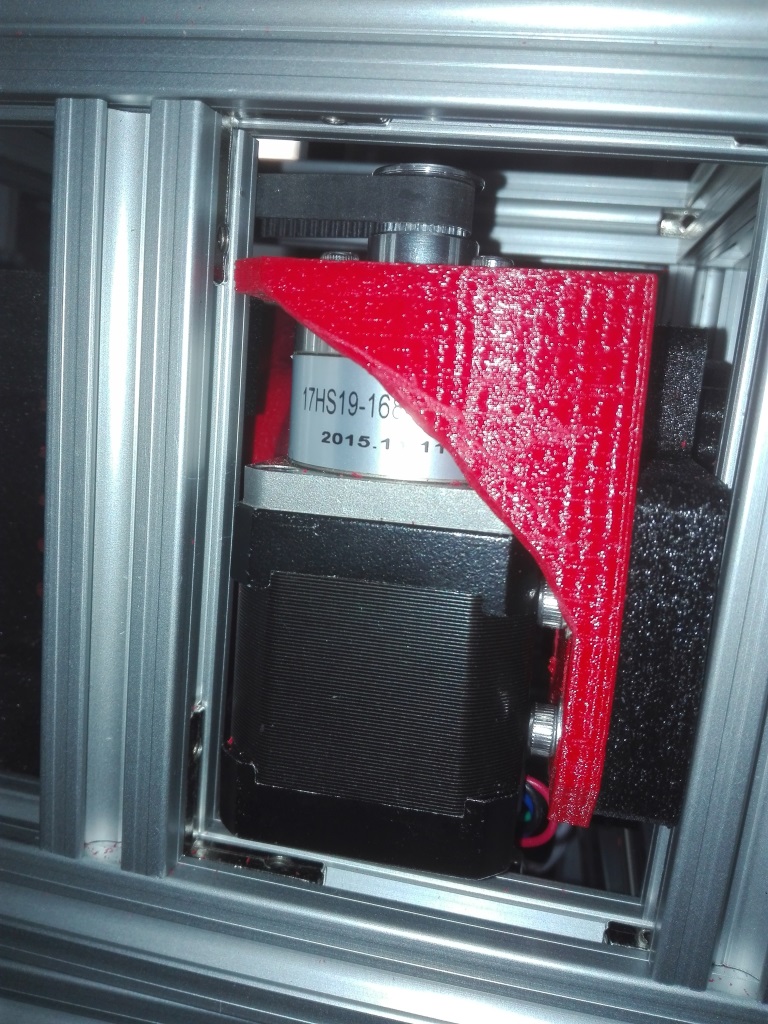
Given the problems I had in building my DC Motor version, I decided to reconvert my second V3 rotor with stepper motor, but this time I wanted to mount the Nema 17 geared 5: 1 in order to have more power in the rotor. So I created some Nema 17 bracket mount printed in 3D a little longer in the anchor bracket, then making holes for attaching the geared version using the classic 158mm belt
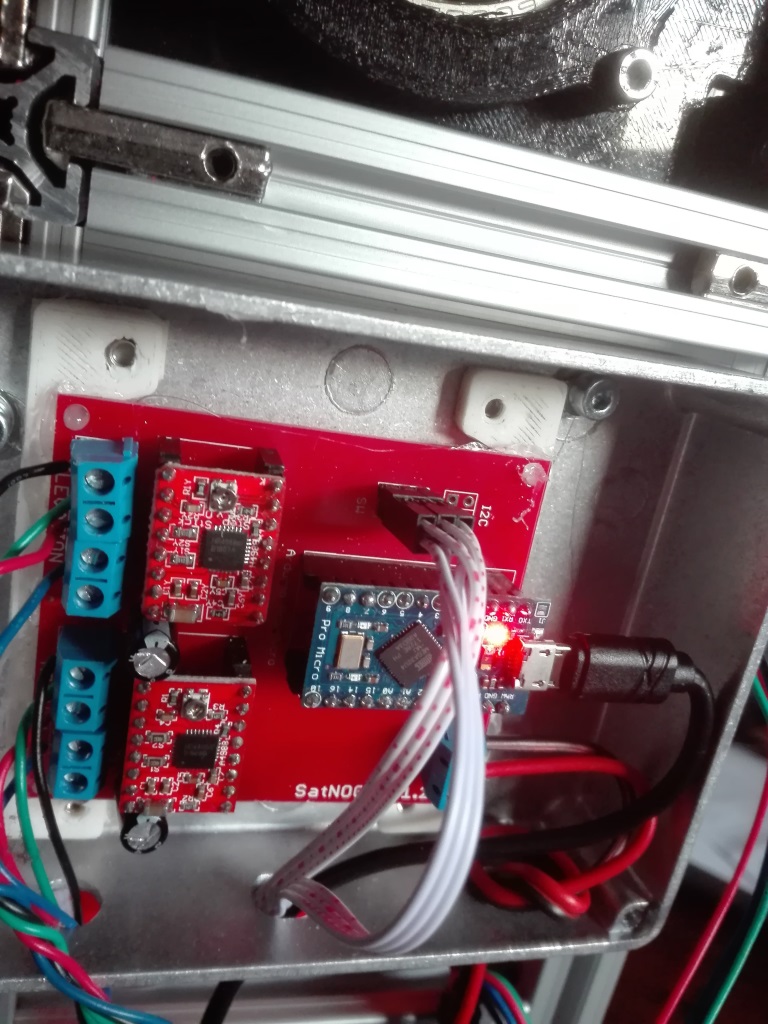
Everything works fine, but now I can not find the correct ratio to be included in the parameters of arduino pro micro firmware (my PCB is version 1.2 powered to 12 v).
In fact, the steps that must make the nema 17 engine are 200, but then should be multiplied by 5.18 which is the ratio of the planetary gearbox of the nema, then 1.036, then I should multiply the result by 54 which would be the ratio of the rotor, then 55.944 . Is it correct?
So I should modify both the SPR variable and the RATIO variable,
but it does not work well, in the sense that the rotor if I tell him to go to 180 degrees actually moves but does not point exactly at 180 degrees, always ends a bit 'first, then I am wrong calculation or the value of the two variables.
#define SPR 200 // Step For Revolution (default 200)
#define RATIO 54 // Gear ratio (default 54)
#define T_DELAY 60000 // Time to disable the motors in millisecond
Someone can help me in the calculation of the values to be included in the variables, or in the firmware do I have to modify some formula?
If I can make it work properly on aiming, we could strengthen the rotor with stepper motor as a force.
**Let me explain better, the nema 17 to make a 360-degree turn requires 200 steps (setting in full step), while the ratio of the planetary gearbox mounted on the nema is 5.18, so we should do 200 * 5.18 = 1036 (step)
therefore the SPR variable should have the value of 1036
#define SPR 1036 // Step For Revolution (default 200);
while the RATIO variable should remain 54 (depending on the version,but in reality the rotor does not position well.Where am I wrong?**
#define RATIO 54 // Gear ratio (default 54)
I thank you in advance for the answers.

Hello
IZ5RZR