Hello everybody, first thanks in advance for the help, I’ve been fighting for over a month with little advance.
I’ve been trying azisi’s tip but something still isn’t working.
This is the current situation:
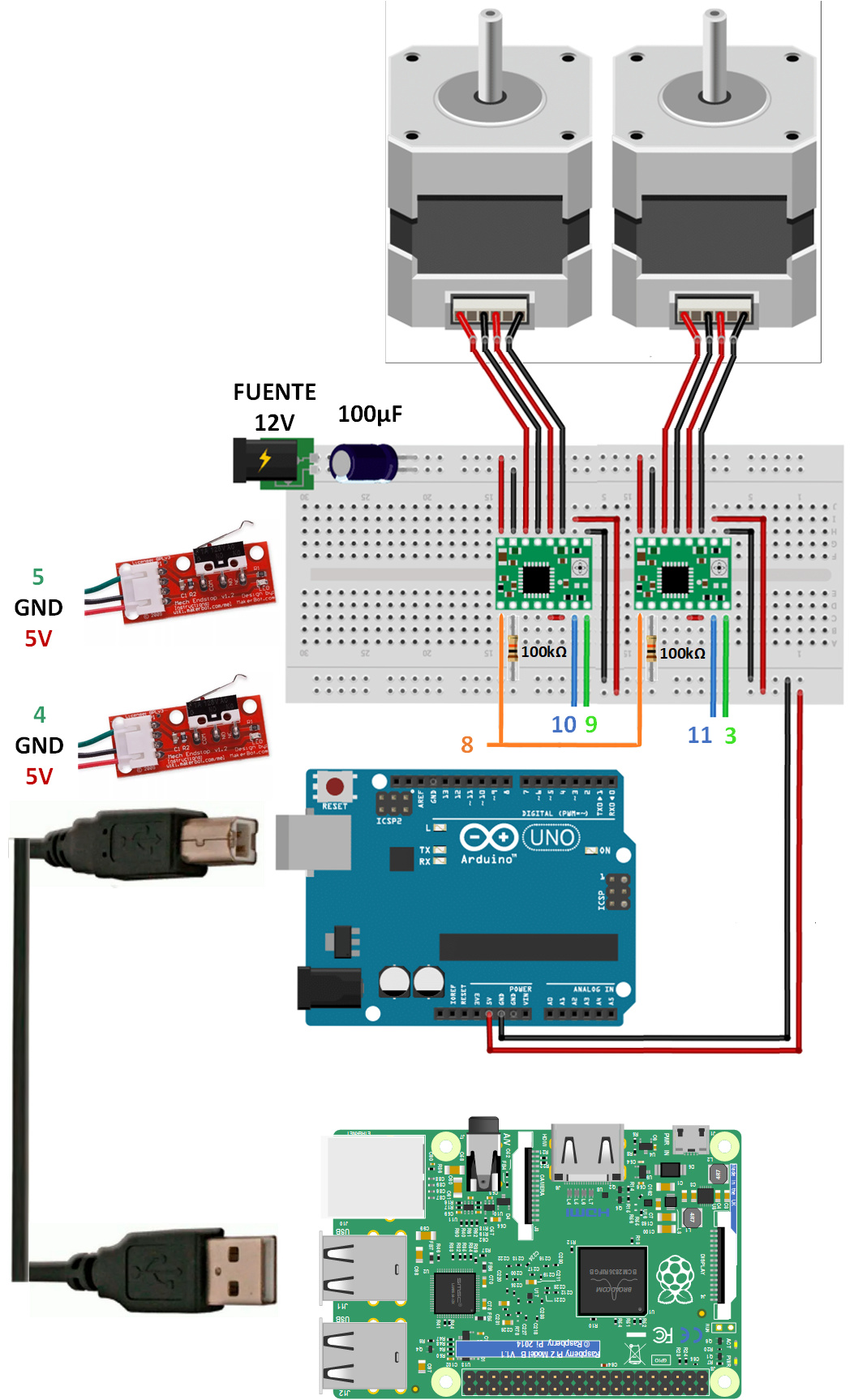
I’m using full step, for stepper motors with A4988 pololu drivers. (now both motors are free to run, no torque on them).
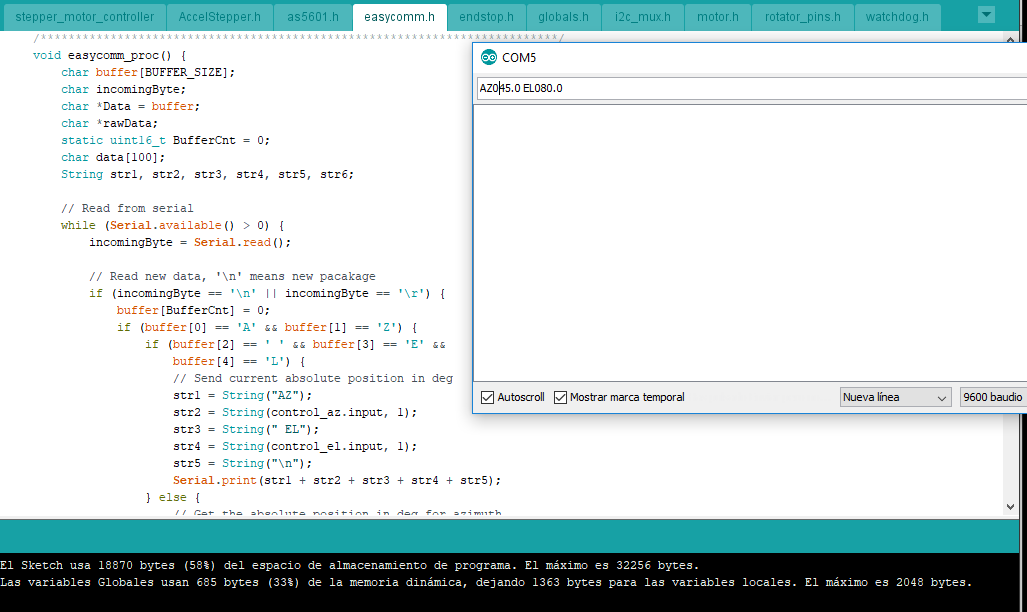
I’ve divided the problem in two, first I beleave the RaspberryPi is not sending any commands, and second the Arduino is not responding to the commands even when I send them from my computer. I changed easycomm.h as the post azisi sheared last reply, in order to use serial ( Serial.read()) instead of rs485 (it’s just like the other version but using serial 9600 baudios instead of rs485 just like in the link below )
At the bottom are the raspberry’s config and the arduino/driver/endstop/motor conextions.
Here is where the noob questions starts:
1 - Do i need to configure anything else like gpredict in order for the raspberry to do it’s magic and send the commands? (I’ve seen posts like this one “Arduino problem with gPredict and rotctld - #11 by ruks” where it seems I need to do a few things before it works) but I didn’t find this steps while installing satnogs client
2 - When I energise the Arduino It starts moving until I press the endstops (twice to be “home”, so I can say the drivers and motors are working fine) but then even when I try sending commands through USB from my computer (something like “AZ100.0 EL045.0” as should easycommIII be, i’ve try lots of combinations) I see the RX light blink but no movement at all (example below)
Here is Rapspi config, I’ve also tried using ttyUSB0 and ttyUSB1:
204 - Hamlib - EasycommIII

Here is the board conextion: