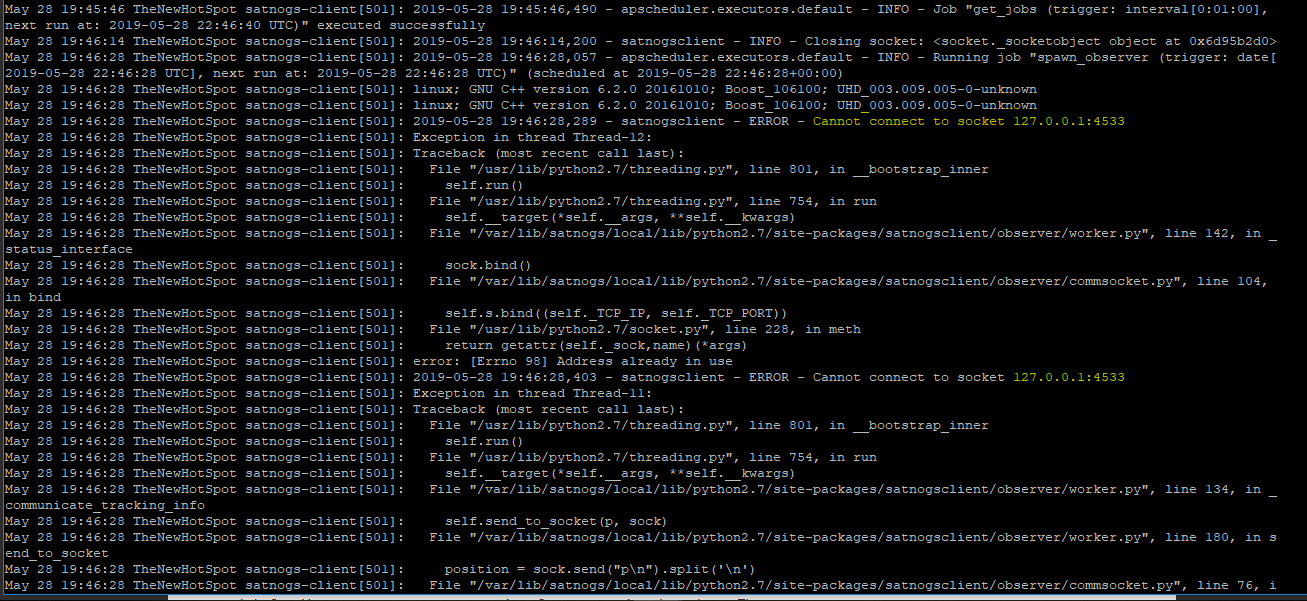
watching RP journal we saw an error we were not getting before, as shown in the image below in yellow, RP is trying to connect to 127.0.0.1:4533
Maybe satnogs client is expecting AZ and EL from that connection?
Patrick,
don’t know why the “d” is missing but as shown in other replies hamlib-+ is running rotctld.
Baudrate is already fixed at 19200 seems to work fine.
well… something did the trick…
maybe it was the change in parameter’s order or maybe it was just turning everything ON with everything connected (sometimes we connected the arduino with RP already ON)
No, that’s wrong! As I told you before: if your code sets up a baudrate at 9600 baud and you need to change it to 19200 in the application connecting to that code there is something really wrong! Most probably the microcontroller is running at the wrong speed. This will cause more problems in the future as all the timing your code is using will be wrong.
sorry I could not follow you, now both the speed in the arduino’s code and in rotctl (RP) are set to 19200 baudios.
Or do you mean that it should have also worked with both at 9600?
Now is actually working, we would really prefer not to change more stuff just in case we go back to square one
This is the default socket address:port of rotctld, no need to set it in command line.
Glad to hear it!
It would be great sometime in future to find out what happened… maybe by experimenting again with the parameters order and/or the other things you changed.
Ok, that was not as clear as now in your previous posts - I did not get it
So if both baudrates are set correct (in the arduino C code and the connecting interface) you are free to choose whatever you prefer! Glad it works now!
Hi,
I think i actually have the same issue as you, the “P” command from the RP are perfectly working (rotctl -m204 -r /dev/ttyACM0 -s 19200 -vvvvv), Hamlib is well enabled , BUT, nothing move when i schedule an observation…
I’m using an arduino uno with a “CNC shield” and that was perfectly working standalone with grpredict on my pc but i wanted to upgrade it to “Satnogs”
I’m sure that this is well ttyACM0, I’ve done the ls /dev/tty* verification
And during the boot of the raspy i have this error : {FAILED} Failed to start rotctld server .
This error message comes after 4 time “Started rotctld server.
Stopped rotctld server .”
Did you had the same “error message” and or did you finally finded a clear solution that could maybe work too in my case ?
Thanks in advance for your answers