Hello Patrick,
first of all thanks a lot for your response. We’ve been looking for basically anywhere, where anyone states clearly that GPredict is NOT needed in order to have a Groundstation that does tracking (sends commands to the rotor), and just with SatNOGS-Client it’s enough for this.
To sum up, I beleave we solved Raspberry’s issues, and now we must move forward to solve Arduino’s lack of communication. (At the bottom is the problem that we suspect is Arduino’s fault)
Here is our current configuration:
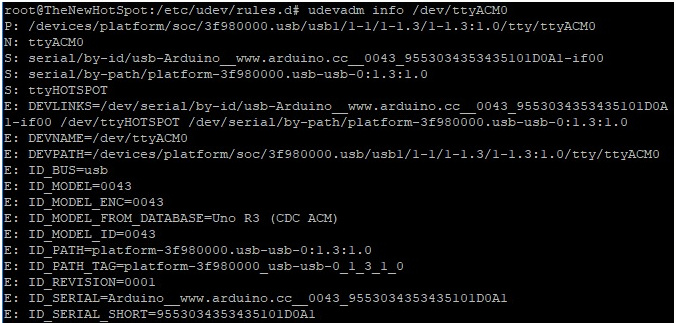
(We dealt with the problem of Raspberry Pi changing the device randomly when rebooting by editing a rule using symlink so our device will always appear as /dev/ttyHOTSPOT)
root@TheNewHotSpot:/etc/udev/rules.d# vi 99-com.rules
![]()
Going on through your suggestions. We verified if our user was part of dialout group to be sure that was not the problem using getent group dialout command.
![]()
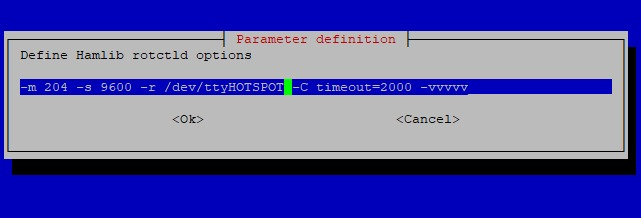
Finally lets move on to rotctl, first of all I used the command with COM3 as an example I copied just to ask about the need of options -T 127.0.0.1 -t 4533 I still don’t understand if I need this parameters and what for if so (we were not using COM3, we were using ttyACM0, and now use ttyHOTSPOT)
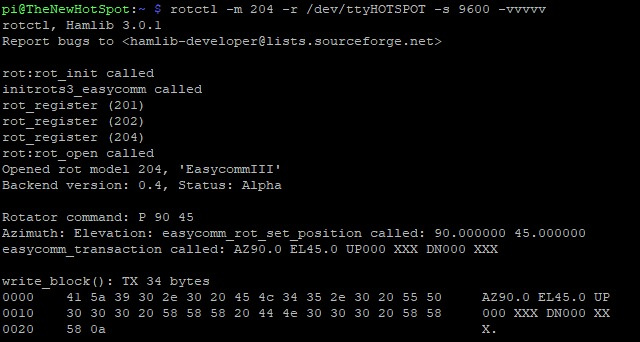
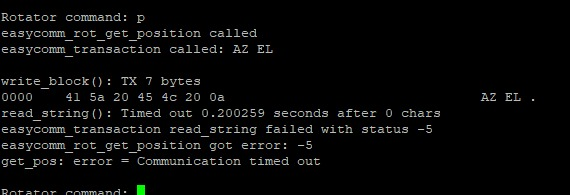
Secondly, we are having problems with rotctl command p as can be seen in images below.
It seems the problem is Raspberry Pi ain’t getting response from the Arduino, so now we are focusing in getting the Arduino to do it’s magic.
If it’s okay for you, in order not to make this thread longer we may discuss Arduino’s problem in this post:
Thank you very very much, we’ve been struggling with this questions/issues for a long time.